")


Edit and compile if you like:
\documentclass[tikz]{standalone}
\usepackage{amssymb}
\usetikzlibrary{shapes.geometric}
\begin{document}
\begin{tikzpicture}[thick]
% Axes
\def\x{5}\def\y{3}
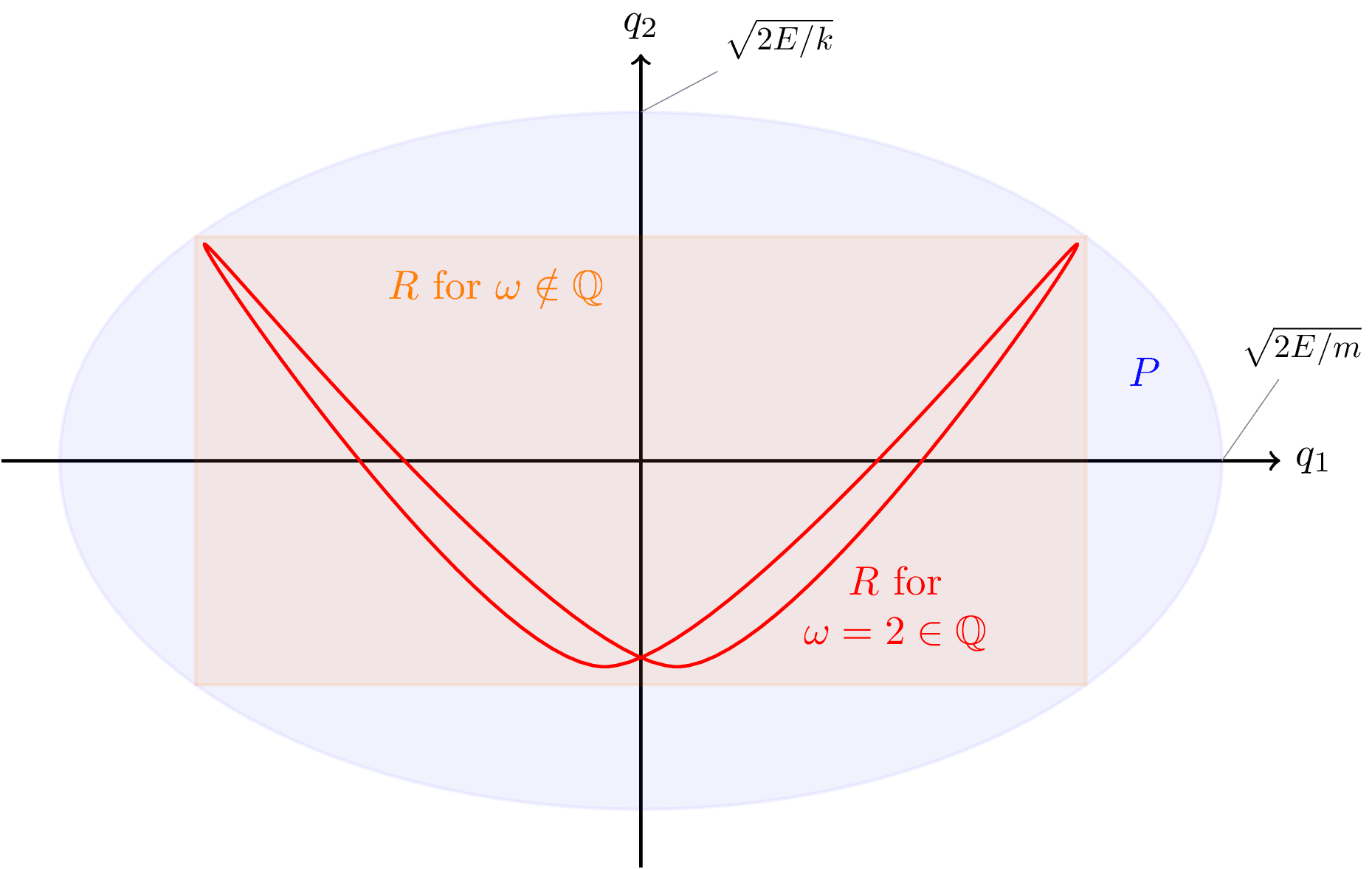
\draw[->] (-\x-0.5,0) -- (\x+0.5,0) node[right] {$q_1$};
\draw[->] (0,-\y-0.5) -- (0,\y+0.5) node[above] {$q_2$};
% Ellipse
\draw[blue,fill=blue,fill opacity=0.05] (0,0) circle [x radius=\x, y radius=\y];
\coordinate[pin={[pin distance=25,scale=0.8]85:$\sqrt{2E/m}$}] (r1) at (\x,0);
\coordinate[pin={[pin distance=25,scale=0.8]30:$\sqrt{2E/k}$}] (r2) at (0,\y);
\node[blue] at (10:\x-0.6) {$P$};
% Rectangle
\draw[orange,fill=orange,fill opacity=0.1] (220:\x+0 and \y+0) rectangle (40:\x+0 and \y+0);
\node[orange] at (-\x/4,\y/2) {$R$ for $\omega \notin \mathbb{Q}$};
% Trajectory
\draw[red] plot [smooth cycle] coordinates {(140:\x-0.1 and \y-0.1) (280:1.8) (40:\x-0.1 and \y-0.1) (260:1.8)} node[shift={(2.5,0.5)},align=center] {$R$ for \\$\omega = 2 \in \mathbb{Q}$};
\end{tikzpicture}
\end{document}
Click to download: ergodic.tex
Open in Overleaf: ergodic.tex
This file is available on tikz.netlify.app and on GitHub and is MIT licensed.
See more on the author page of Janosh Riebesell..

