")


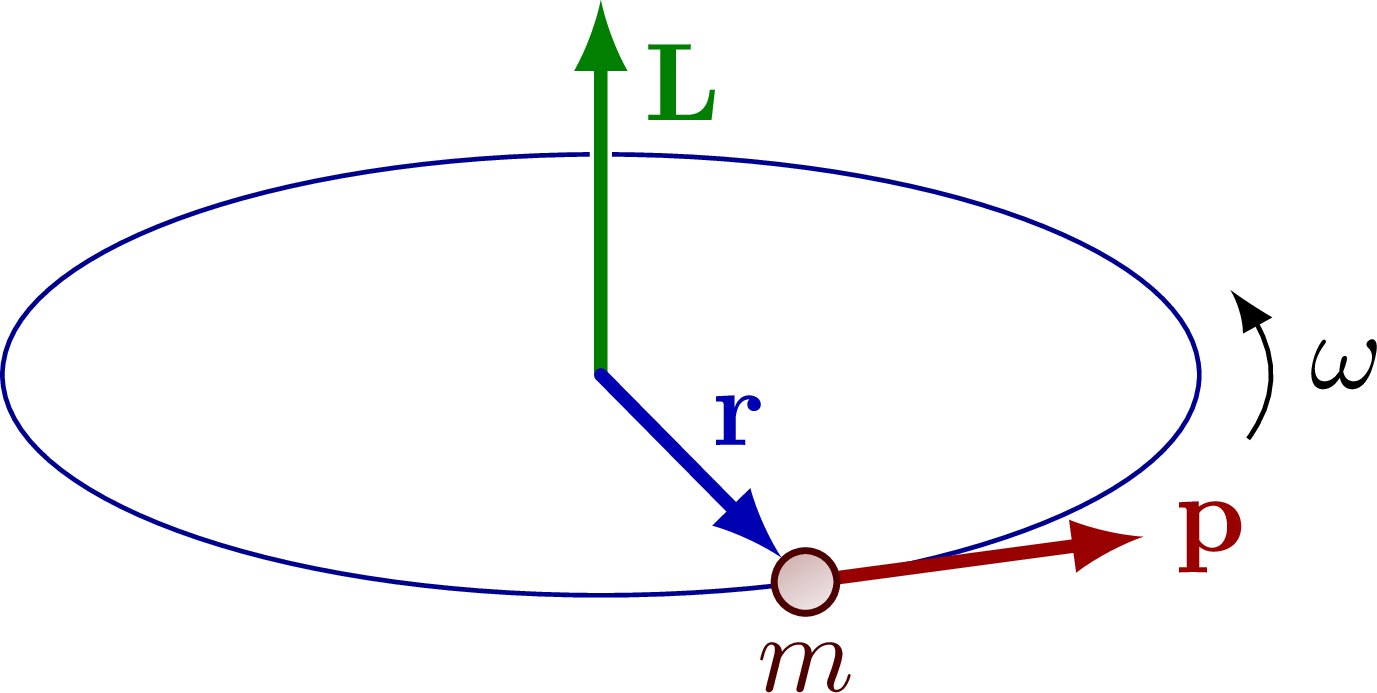
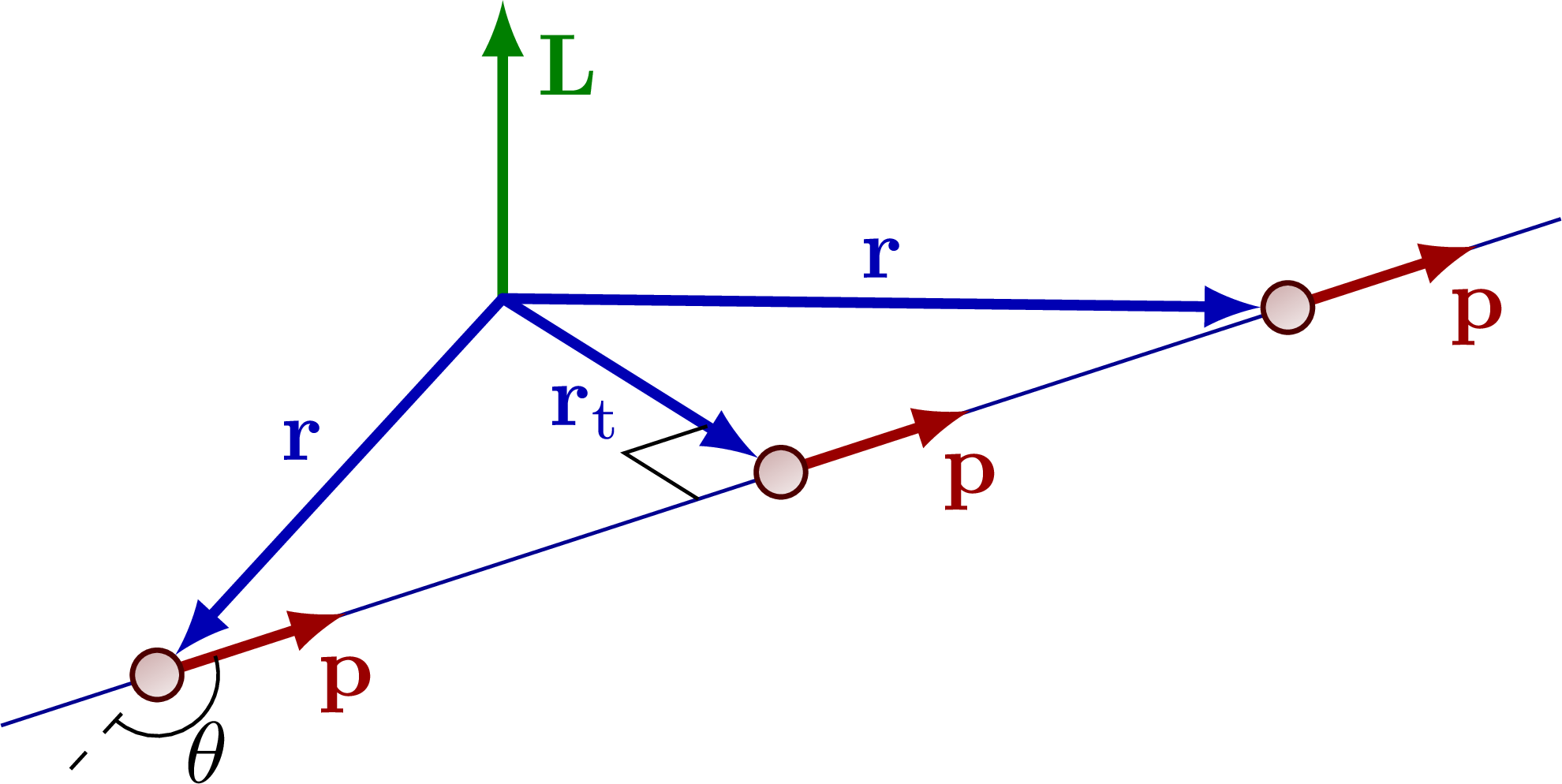
Angular momentum of a mass moving uniformly in a circle, or in a straight line.
For more related figures, please see the “angular momentum” or “torque” tags.
Edit and compile if you like:
% Author: Izaak Neutelings (October 2020)
\documentclass[border=3pt,tikz]{standalone}
\usepackage{physics}
\usepackage{tikz}
\usetikzlibrary{calc}
\usetikzlibrary{angles,quotes} % for pic
\usetikzlibrary{bending} % for arrow head angle
\tikzset{>=latex} % for LaTeX arrow head
\colorlet{xcol}{blue!70!black}
\colorlet{vcol}{green!60!black}
\colorlet{pcol}{red!60!black}
\colorlet{Lcol}{green!50!black}
\colorlet{myred}{red!65!black}
\colorlet{mypurple}{blue!60!red!80}
\colorlet{acol}{red!50!blue!80!black!80}
\tikzstyle{rvec}=[->,xcol,very thick,line cap=round]
\tikzstyle{vvec}=[->,vcol,very thick,line cap=round]
\tikzstyle{pvec}=[->,pcol,very thick,line cap=round]
\tikzstyle{Lvec}=[->,Lcol,very thick,line cap=round]
\tikzstyle{mass}=[line width=0.6,red!30!black,draw=red!30!black, %rounded corners=1,
top color=red!40!black!30,bottom color=red!40!black!10,shading angle=30]
\begin{document}
% ANGULAR MOMENTUM
\begin{tikzpicture}
\def\R{1.9} % circle radius
\def\Ry{0.7} % circle radius
\def\r{1.4} % mass radius (inner sep)
\def\ang{-70} % mass angular position
\coordinate (O) at (0,0);
\coordinate (L) at (0,1.7*\Ry);
\coordinate (R) at (\ang:{\R} and \Ry);
\draw[xcol!80!black] (O) ellipse({\R} and \Ry);
\draw[pvec] (R) --++ (\ang+90:{0.6*\R} and 0.6*\Ry) node[right=-1] {$\vb{p}$};
\node[mass,circle,inner sep=2] (R') at (R) {};
\node[red!30!black,below=2] at (R') {$m$};
\draw[white,line width=2] (O) -- (L);
\draw[Lvec] (O) -- (L) node[below right=0] {$\vb{L}$};
\draw[rvec] (O) -- (R') node[midway,above right=-2] {$\vb{r}$};
\draw[-{>[bend]}] (-15:{1.12*\R} and {1.12*\Ry}) arc(-15:20:{1.12*\R} and {1.12*\Ry})
node[pos=0.5,right] {$\omega$};
\end{tikzpicture}
% ANGULAR MOMENTUM - straight line
\begin{tikzpicture}
\def\R{3.3} % circle radius
\def\r{1.4} % mass radius (inner sep)
\def\L{1.2} % angular momentum
\def\v{0.8} % velocity
\def\l{0.35} % angular momentum
\def\ang{18} % mass angular position
\def\angp{40} % angle to feign perspective
\coordinate (O) at (\ang+90+\angp:0.4*\R);
\coordinate (R1) at (\ang-180:0.8*\R);
\coordinate (R2) at (0,0);
\coordinate (R3) at (\ang:0.65*\R);
\coordinate (R1E) at ($(O)!1.25!(R1)$); % R1 extended
\draw[Lvec] (O) --++ (0,\L) node[below right=0] {$\vb{L}$};
\draw[xcol!80!black] (\ang-180:\R) -- (\ang:\R);
\draw[dashed] (R1) -- (R1E);
\draw[pvec] (R1) --++ (\ang:\v) node[below=1] {$\vb{p}$};
\draw[pvec] (R2) --++ (\ang:\v) node[below=1] {$\vb{p}$};
\draw[pvec] (R3) --++ (\ang:\v) node[below=1] {$\vb{p}$};
\node[mass,circle,inner sep=2] (R1') at (R1) {};
\node[mass,circle,inner sep=2] (R2') at (R2) {};
\node[mass,circle,inner sep=2] (R3') at (R3) {};
\draw[rvec] (O) -- (R1') node[midway,above left=-2] {$\vb{r}$};
\draw[rvec] (O) -- (R2') node[midway,below left=-3] {$\vb{r}_\mathrm{t}$};
\draw[rvec] (O) -- (R3') node[midway,above=-1] {$\vb{r}$};
\draw (R2)++(\ang-180:\l) --++ (\ang+90+\angp:\l) --++ (\ang:\l);
%\draw pic["$\theta$",draw,angle radius=24,angle eccentricity=1.24] {angle=R2--R1--O};
\draw pic["$\theta$",draw,angle radius=7,angle eccentricity=1.5] {angle=R1E--R1--R2};
\end{tikzpicture}
\end{document}
Click to download: dynamics_angular_momentum.tex • dynamics_angular_momentum.pdf
Open in Overleaf: dynamics_angular_momentum.tex



