")


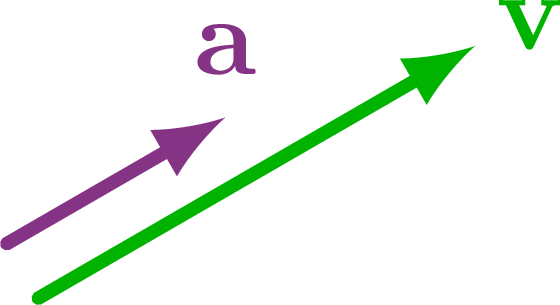
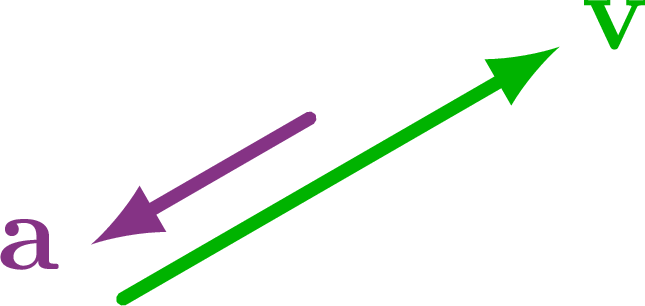
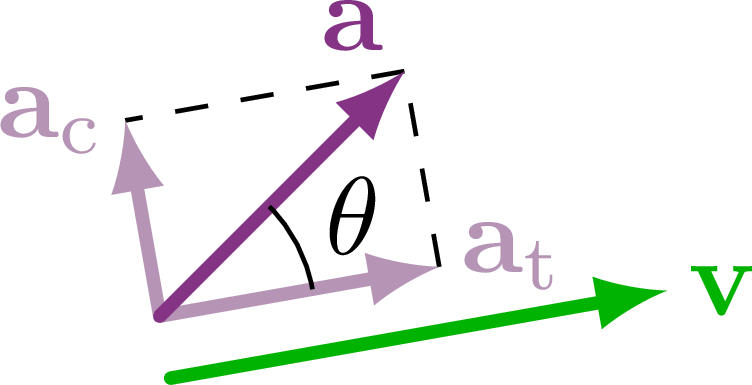
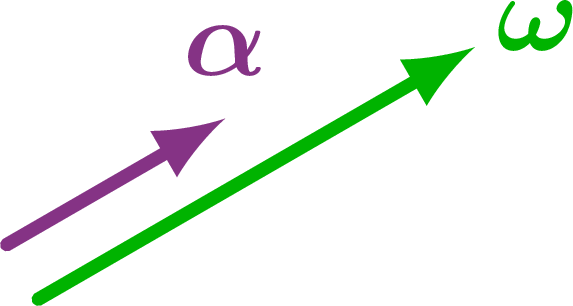
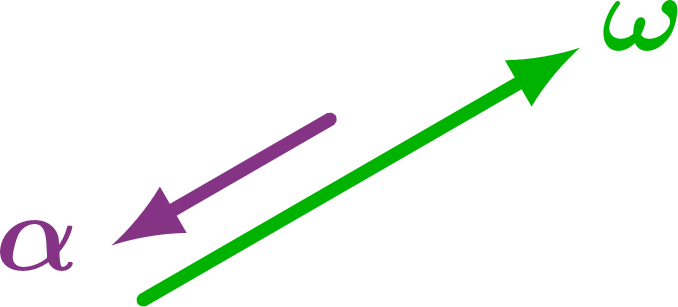
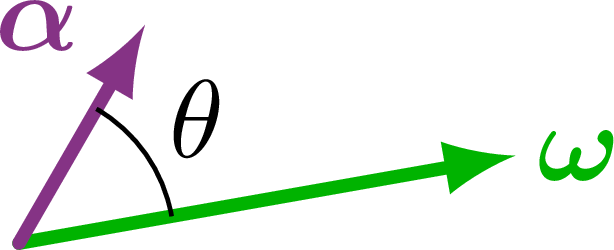
Different cases of the angle between the velocity and acceleration vectors.
Also see other figures under the “vectors” tag: vector sum rule, right-hand rule, scalar production, or the divergence and curl of vector fields.


Edit and compile if you like:
% Author: Izaak Neutelings (October 2020)
\documentclass[border=3pt,tikz]{standalone}
\usepackage{physics}
\usepackage{tikz}
\usetikzlibrary{angles,quotes} % for pic
\tikzset{>=latex} % for LaTeX arrow head
\colorlet{myred}{red!65!black}
\colorlet{xcol}{blue!70!black}
\colorlet{vcol}{green!70!black}
\colorlet{acol}{red!50!blue!80!black!80}
\tikzstyle{mass}=[line width=0.6,red!30!black,fill=red!40!black!10,rounded corners=1,
top color=red!40!black!20,bottom color=red!40!black!10,shading angle=20]
\tikzstyle{vvec}=[->,vcol,very thick,line cap=round]
\tikzstyle{avec}=[->,acol,very thick,line cap=round]
\begin{document}
% POSITIVE ACCELERATION
\def\v{1.6} % velocity magnitude
\def\a{0.8} % acceleration magnitude
\def\ang{30} % angle
\begin{tikzpicture}
\coordinate (O) at (0,0);
\coordinate (V) at (\ang:\v);
\coordinate (A) at (\ang:\a);
\draw[vvec] (O)++(\ang-90:0.1) --++ (V) node[above=2,right=-2] {$\vb{v}$};
\draw[avec] (O)++(\ang+90:0.1) --++ (A) node[above=0] {$\vb{a}$};
\end{tikzpicture}
% NEGATIVE ACCELERATION
\begin{tikzpicture}
\coordinate (O) at (0,0);
\coordinate (V) at (\ang:\v);
\coordinate (A) at (\ang:\a);
\draw[vvec] (O)++(\ang-90:0.1) --++ (V) node[above=2,right=-2] {$\vb{v}$};
\draw[avec] (A)++(\ang+90:0.1) --++ (\ang-180:\a) node[left=-1] {$\vb{a}$};
\end{tikzpicture}
% ANGLED ACCELERATION
\begin{tikzpicture}
\coordinate (O) at (0,0);
\coordinate (V) at (10:\v);
\coordinate (A) at (60:\a);
\draw[vvec] (O) --++ (V) node[right=-2] {$\vb{v}$};
\draw[avec] (O) --++ (A) node[left=2] {$\vb{a}$};
\draw pic["$\theta$",draw=black,angle radius=14,angle eccentricity=1.4] {angle=V--O--A};
\end{tikzpicture}
% ANGLED ACCELERATION - break down
\begin{tikzpicture}
\def\v{1.6} % velocity magnitude
\def\a{1.1} % acceleration magnitude
\def\angv{10} % angle velocity
\def\anga{45} % angle acceleration
\coordinate (O) at (0,0);
\coordinate (V) at (\angv:\v);
\coordinate (A) at (\anga:\a);
\coordinate (AT) at (\angv:{\a*cos(\anga-\angv)});
\coordinate (AC) at (\angv+90:{\a*sin(\anga-\angv)});
\draw[vvec] (O)++(\angv-90:0.2) --++ (V) node[right=-2] {$\vb{v}$};
\draw[dashed] (AT) -- (A) -- (AC);
\draw[avec,acol!80!black!50] (O) -- (AT) node[above=1,right=-2] {$\vb{a}_\mathrm{t}$};
\draw[avec,acol!80!black!50] (O) -- (AC) node[left=-2] {$\vb{a}_\mathrm{c}$};
\draw[avec] (O) --++ (A) node[above left=-2] {$\vb{a}$};
\draw pic["$\theta$",draw=black,angle radius=14,angle eccentricity=1.4] {angle=V--O--A};
\end{tikzpicture}
% ANGLED ACCELERATION - opposite
\begin{tikzpicture}
\coordinate (O) at (0,0);
\coordinate (V) at (10:\v);
\coordinate (A) at (160:\a);
\draw[dashed] (O) --++ (-170:0.4*\v);
\draw[vvec] (O) --++ (V) node[right=-2] {$\vb{v}$};
\draw[avec] (O) --++ (A) node[left=2] {$\vb{a}$};
\draw pic["$\theta$",draw=black,angle radius=9,angle eccentricity=1.65] {angle=V--O--A};
\end{tikzpicture}
% POSITIVE ANGULAR ACCELERATION
\begin{tikzpicture}
\coordinate (O) at (0,0);
\coordinate (V) at (\ang:\v);
\coordinate (A) at (\ang:\a);
\draw[vvec] (O)++(\ang-90:0.1) --++ (V) node[above=2,right=-2] {$\vb*{\omega}$};
\draw[avec] (O)++(\ang+90:0.1) --++ (A) node[above=0] {$\vb*{\alpha}$};
\end{tikzpicture}
% NEGATIVE ANGULAR ACCELERATION
\begin{tikzpicture}
\coordinate (O) at (0,0);
\coordinate (V) at (\ang:\v);
\coordinate (A) at (\ang:\a);
\draw[vvec] (O)++(\ang-90:0.1) --++ (V) node[above=2,right=-2] {$\vb*{\omega}$};
\draw[avec] (A)++(\ang+90:0.1) --++ (\ang-180:\a) node[left=-1] {$\vb*{\alpha}$};
\end{tikzpicture}
% ANGLED ANGULAR ACCELERATION
\begin{tikzpicture}
\coordinate (O) at (0,0);
\coordinate (V) at (10:\v);
\coordinate (A) at (60:\a);
\draw[vvec] (O) --++ (V) node[right=-2] {$\vb*{\omega}$};
\draw[avec] (O) --++ (A) node[left=2] {$\vb*{\alpha}$};
\draw pic["$\theta$",draw=black,angle radius=14,angle eccentricity=1.4] {angle=V--O--A};
\end{tikzpicture}
\end{document}Click to download: dynamics_acceleration.tex • dynamics_acceleration.pdf
Open in Overleaf: dynamics_acceleration.tex