")


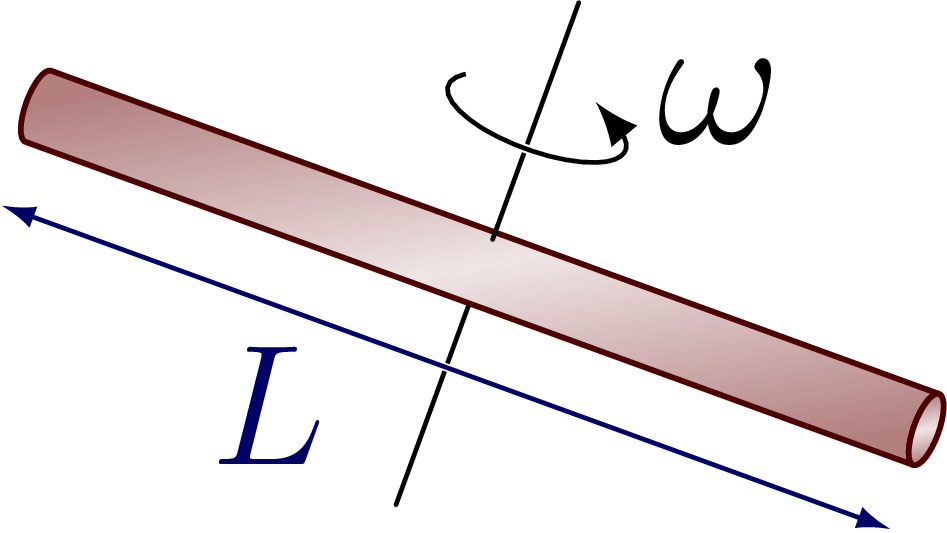
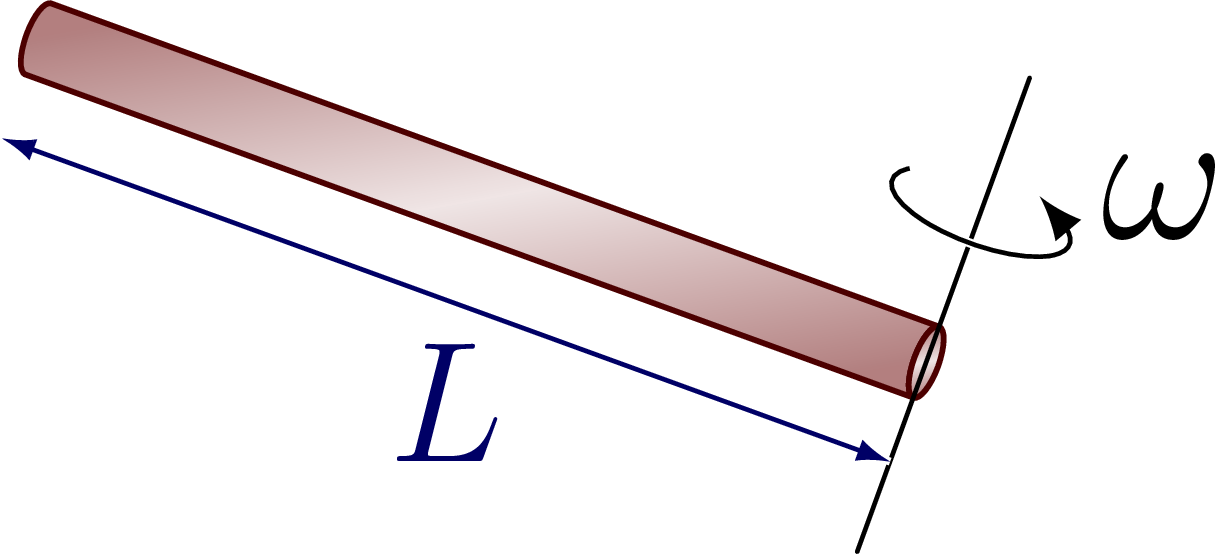
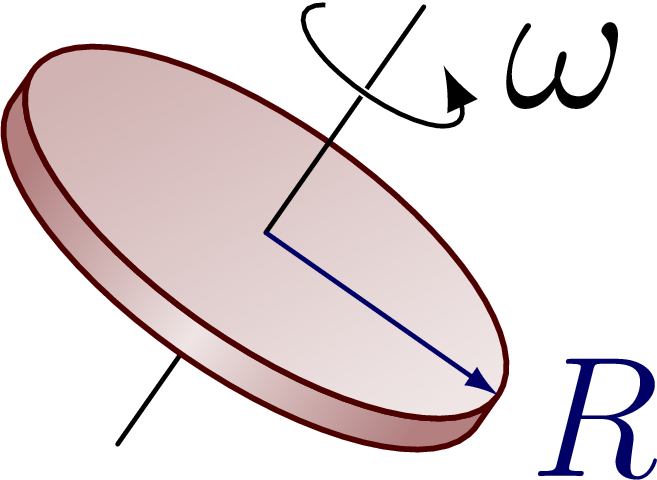
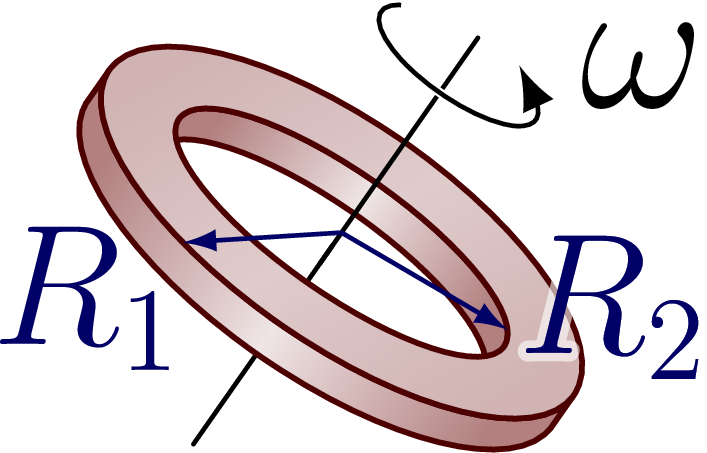
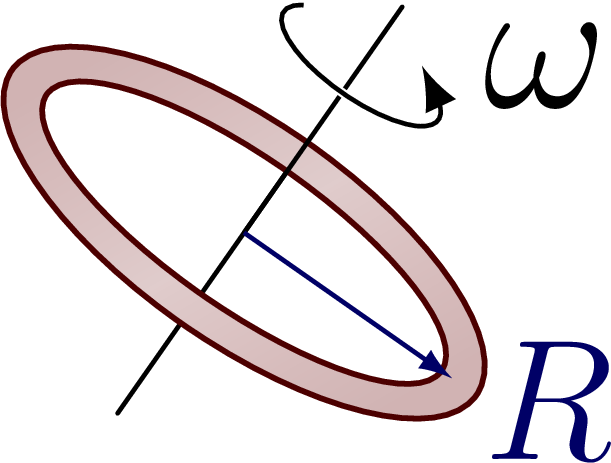
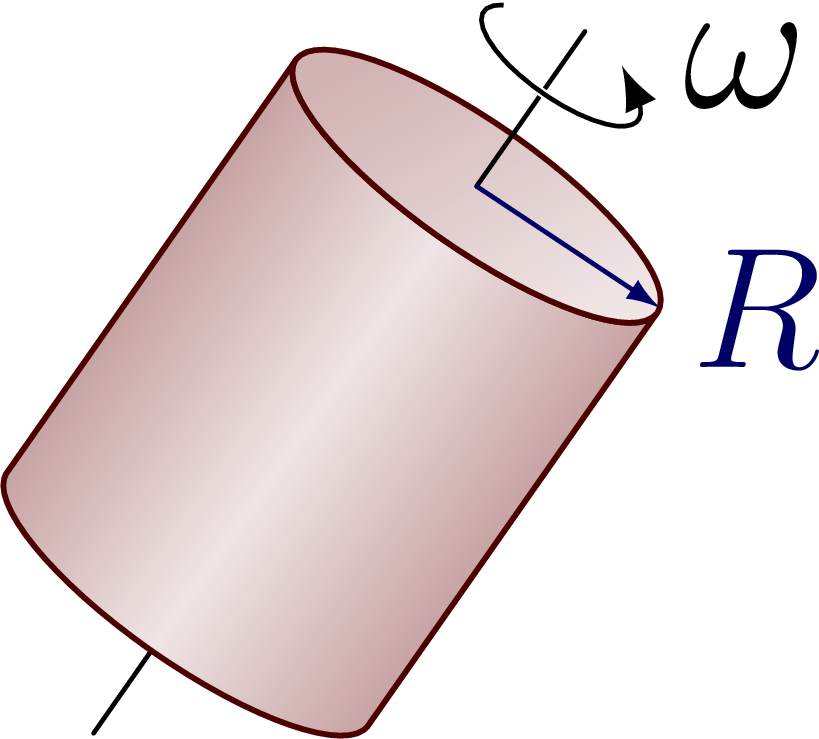
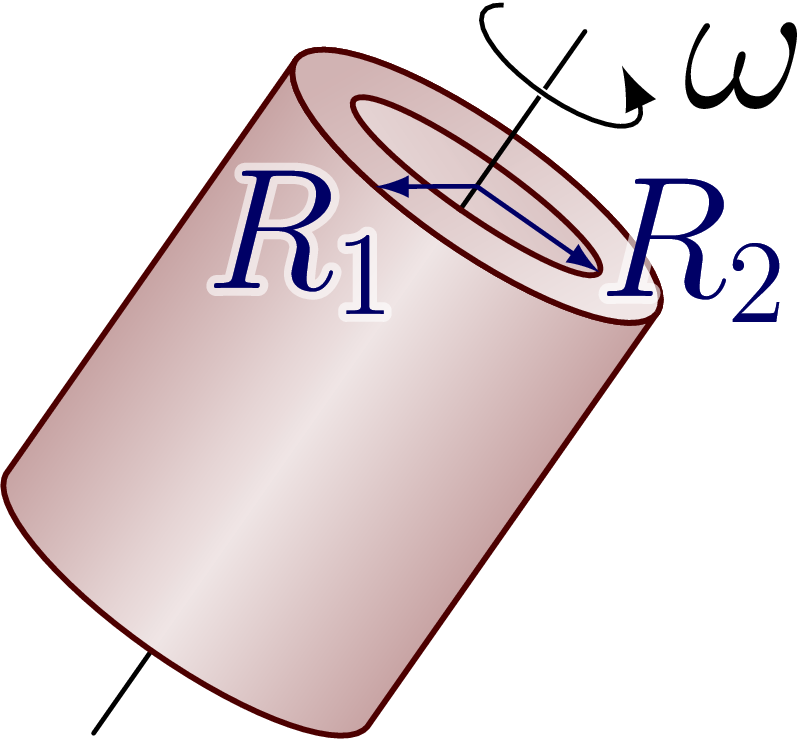
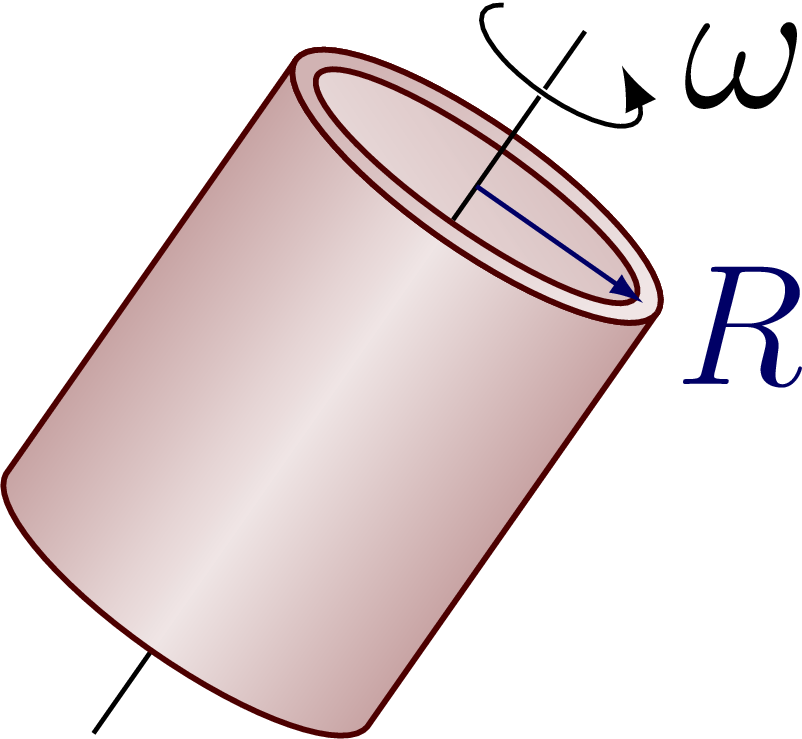
Some basic shapes that rotate to compute the moment of inertia: solid or hollow sphere, ring, disk, disk with a hole, solid cylinder, hollow cylinder.
Alternative diagrams are in this post. For more related figures, please see the “angular momentum” or “torque” tags.

Edit and compile if you like:
% Author: Izaak Neutelings (January 2021)
\documentclass[border=3pt,tikz]{standalone}
\usepackage{physics}
\usepackage{tikz}
\usepackage[outline]{contour} % glow around text
\usetikzlibrary{calc}
\usetikzlibrary{angles,quotes} % for pic
\usetikzlibrary{arrows.meta}
\usetikzlibrary{patterns}
\usetikzlibrary{bending} % for arrow head angle
\tikzset{>=latex} % for LaTeX arrow head
\contourlength{0.8pt}
\colorlet{xcol}{blue!70!black}
\colorlet{myred}{red!65!black}
\tikzstyle{rvec}=[->,xcol,very thick,line cap=round]
\tikzstyle{mass line}=[line width=0.5,draw=red!30!black]
\tikzstyle{myarr}=[-{Latex[length=3,width=2]},blue!40!black]
\tikzstyle{myarr2}=[{Latex[length=3,width=2]}-{Latex[length=3,width=2]},blue!40!black]
\tikzstyle{mass}=[mass line, %rounded corners=1,
top color=red!40!black!30,bottom color=red!40!black!10,shading angle=30]
\tikzstyle{middle mass}=[mass line,top color=red!40!black!50,bottom color=red!40!black!50,
middle color=red!40!black!10,shading angle=30]
\def\r{0.05} % pulley small radius
\tikzset{
pics/rotarr/.style={
code={
\draw[white,line width=0.8] ({#1*cos(210)},0) arc(-210:35:{#1} and {0.35*#1});
\draw[-{>[flex'=1]}] ({#1*cos(210)},0) coordinate (W1) arc(-210:35:{#1} and {0.35*#1})
node[midway] (W2) {} --++ (150:0.1) coordinate (W3);
}},
pics/rotarr/.default=0.3,
}
\begin{document}
\LARGE
% MOMENT OF INERTIA - masses on rods
\def\ang{-20} % angle of whole picture
\begin{tikzpicture}[rotate=\ang]
\def\h{0.9} % length z axis
\def\L{3.0} % length rod
\def\R{1.9} % circle radius
\def\r{1.4} % mass radius (inner sep)
\coordinate (O) at (0,0);
\coordinate (L) at (-\R/2,0);
\coordinate (R) at ( \R/2,0);
\draw (0,-\h) -- (0,\h) coordinate (T);
\pic[xscale=1,rotate=\ang] at (0,0.7*\h) {rotarr};
\node[below=1,right=1] at (W3) {$\omega$};
\draw[line width=1.8,red!25!black] (L) -- (R);
\node[mass,circle,inner sep=\r,scale=0.8] (L') at (L) {$m$};
\node[mass,circle,inner sep=\r,scale=0.8] (R') at (R) {$m$};
\draw[<->] (L)++(0,-0.2*\R) --++ ( \R/2,0) node[midway,below=-1] {$r$}; %\frac{r}{2}
\draw[<->] (R)++(0,-0.2*\R) --++ (-\R/2,0) node[midway,below=-1] {$r$};
\end{tikzpicture}
%% MOMENT OF INERTIA - masses on rods - shifted
%\begin{tikzpicture}
% \def\R{1.9} % circle radius
% \def\r{1.4} % mass radius (inner sep)
% \def\ang{40} % mass anglular position
% \coordinate (O) at (0,0);
% \coordinate (L) at (-\R/2,0);
% \coordinate (R) at ( \R/2,0);
% \draw[dashed] (-\R/2,-0.5*\R) --++ (0,1.05*\R) coordinate (T);
% \pic[scale=1] at ($(T)+(0,-0.1*\R)$) {rotarr};
% \node[below right=1] at (W3) {$\omega$};
% \draw[line width=1.8,red!25!black] (L) -- (R);
% \node[mass,circle,inner sep=\r] (L') at (L) {$m$};
% \node[mass,circle,inner sep=\r] (R') at (R) {$m$};
% \draw[<->] (L)++(0,-0.2*\R) --++ (\R,0) node[midway,fill=white,inner sep=1] {$r$};
%\end{tikzpicture}
% MOMENT OF INERTIA - ROD
\def\h{0.8} % length z axis
\def\L{3.0} % length rod
\def\Ry{0.12} % horizontal radius
\def\Rx{0.04} % vertical radius
\def\ang{-20} % angle of whole picture
\def\rod{
\draw[middle mass,shading angle=\ang+30]
(-\L/2,-\Ry) coordinate (BL) -++ (\L,0)
arc(270:90:{\Rx} and {\Ry}) --++ (-\L,0)
arc(90:270:{\Rx} and {\Ry});
\draw[middle mass,shading angle=\ang+30]
(\L/2,0) ellipse({\Rx} and {\Ry});
}
\begin{tikzpicture}[rotate=\ang]
\draw[line cap=round] (0,0) --++ (0,-\h);
\rod
\draw[line cap=round] (0,0.8*\Ry) --++ (0,\h);
\pic[xscale=1,rotate=\ang] at (0,0.7*\h) {rotarr};
\node[right=0] at (W3) {$\omega$};
\draw[white,line width=0.7] (BL)++(0,-1.8*\Ry) --++ (\L,0);
\draw[myarr2] (BL)++(0,-1.8*\Ry) --++ (\L,0)
node[pos=0.3,below=-1,scale=0.9] {$L$};
\end{tikzpicture}
% MOMENT OF INERTIA - ROD (axis through end)
\begin{tikzpicture}[rotate=\ang]
\rod
\draw[line cap=round] (\L/2,-0.8*\h) --++ (0,2*\h);
\pic[xscale=1,rotate=\ang] at (\L/2,0.7*\h) {rotarr};
\node[right=0] at (W3) {$\omega$};
\draw[white,line width=0.7] (BL)++(0,-1.8*\Ry) --++ (\L,0);
\draw[myarr2] (BL)++(0,-1.8*\Ry) --++ (\L,0)
node[midway,below=-1,scale=0.9] {$L$};
\end{tikzpicture}
% MOMENT OF INERTIA - DISK
\def\H{0.12} % thickness
\def\Rx{0.90} % horizontal radius
\def\Ry{0.35} % vertical radius
\def\ang{-35} % angle of whole picture
\begin{tikzpicture}[rotate=\ang]
\coordinate (O) at (0,\H);
\draw[line cap=round] (0,0) --++ (0,-2.0*\Ry);
\draw[middle mass,shading angle=90+\ang]
(-\Rx,0) --++ (0,\H) arc(-180:0:{\Rx} and {\Ry}) --++ (0,-\H) arc(0:-180:{\Rx} and {\Ry});
\draw[mass,even odd rule] (O) ellipse({\Rx} and \Ry);
\draw[line cap=round] (O) --++ (0,2.5*\Ry); %node[left] {$z$};
\pic[xscale=1,rotate=\ang] at (0,\H+2.0*\Ry) {rotarr};
\node[right=0] at (W3) {$\omega$};
\draw[myarr] (O) --++ (0:{\Rx} and {\Ry})
node[below=2,right=-2,scale=0.9] {$R$};
\end{tikzpicture}
% MOMENT OF INERTIA - HOLLOW DISK
\begin{tikzpicture}[rotate=\ang]
\def\sx{0.70}
\def\sy{0.55}
\coordinate (O) at (0,\H);
\draw[line cap=round] (0,0.2*\Ry) -- (0,-2.0*\Ry);
\draw[middle mass,shading angle=90+\ang]
(-\sx*\Rx,0) --++ (0,\H) arc(180:0:{\sx*\Rx} and {\sy*\Ry}) --++ (0,-\H) arc(0:180:{\sx*\Rx} and {\sy*\Ry});
\draw[middle mass,shading angle=90+\ang]
(-\Rx,0) --++ (0,\H) arc(-180:0:{\Rx} and {\Ry}) --++ (0,-\H) arc(0:-180:{\Rx} and {\Ry});
\draw[mass line,even odd rule,
top color=red!40!black!30,bottom color=red!40!black!30,middle color=red!40!black!20,shading angle=30]
(O) ellipse({\Rx} and \Ry) ellipse({\sx*\Rx} and \sy*\Ry);
\draw[line cap=round] (0,0) --++ (0,2.5*\Ry); %node[left] {$z$};
\pic[xscale=1,rotate=\ang] at (0,\H+2.0*\Ry) {rotarr};
\node[right=0] at (W3) {$\omega$};
%\draw[myarr] (O) --++ (0:{\Rx} and {\Ry})
% node[below=2,right=-2,scale=0.9] {$R$};
\draw[myarr] (O) --++ (-116:{\Rx} and {\Ry})
node[below=5,left=-5,scale=0.9] {$R_1$};
\draw[myarr] (O) --++ (15:{\sx*\Rx} and {\sy*\Ry})
node[above=2,right=-4,scale=0.9,opacity=0.6] {\contour{white}{$R_2$}}
node[above=2,right=-4,scale=0.9] {$R_2$};
\end{tikzpicture}
% MOMENT OF INERTIA - RING
\begin{tikzpicture}[rotate=\ang]
\def\sx{0.85}
\def\sy{0.68}
\coordinate (O) at (0,0);
\draw[line cap=round] (0,\Ry) -- (0,-2.0*\Ry);
\draw[mass line,even odd rule,
top color=red!40!black!30,bottom color=red!40!black!30,middle color=red!40!black!20,shading angle=30]
(O) ellipse({\Rx} and \Ry) ellipse({\sx*\Rx} and \sy*\Ry);
\draw[line cap=round] (O) --++ (0,2.5*\Ry); %node[left] {$z$};
\pic[xscale=1,rotate=\ang] at (0,2.0*\Ry) {rotarr};
\node[right=0] at (W3) {$\omega$};
\draw[myarr] (O) --++ (0:{0.5*(\sx+0.94)*\Rx} and {0.5*(\sy+0.94)*\Ry})
node[below=2,right=-2,scale=0.9] {$R$};
\end{tikzpicture}
% MOMENT OF INERTIA - SOLID CYLINDER
\def\H{1.6} % cylinder length
\def\Rx{0.70} % horizontal radius
\def\Ry{0.20} % vertical radius
\begin{tikzpicture}[rotate=\ang]
\coordinate (O) at (0,\H);
\draw[line cap=round] (0,0) --++ (0,-2.6*\Ry);
\draw[middle mass,shading angle=90+\ang]
(-\Rx,0) --++ (0,\H) arc(-180:0:{\Rx} and {\Ry}) --++ (0,-\H) arc(0:-180:{\Rx} and {\Ry});
\draw[mass] (O) ellipse({\Rx} and \Ry);
\draw[line cap=round] (O) --++ (0,3.0*\Ry); %node[left] {$z$};
\pic[xscale=1,rotate=\ang] at (0,\H+2.6*\Ry) {rotarr};
\node[right=0] at (W3) {$\omega$};
\draw[myarr] (O) --++ (5:{\Rx} and {\Ry}) node[right=-2,scale=0.9] {$R$};
\end{tikzpicture}
% MOMENT OF INERTIA - HOLLOW CYLINDER
\begin{tikzpicture}[rotate=\ang]
\def\sx{0.68}
\def\sy{0.45}
\coordinate (O) at (0,\H);
\draw[line cap=round] (0,0) -- (0,-2.6*\Ry);
\draw[mass,shading angle=\ang-20]
(O) ellipse({\Rx} and \Ry);
\draw[middle mass,shading angle=90+\ang]
(-\Rx,0) --++ (0,\H) arc(-180:0:{\Rx} and {\Ry}) --++ (0,-\H) arc(0:-180:{\Rx} and {\Ry});
\draw[mass,even odd rule]
(O) ellipse({\Rx} and \Ry) ellipse({\sx*\Rx} and {\sy*\Ry});
\draw[line cap=round] (0,\H-\sy*\Ry+0.01) -- (0,\H+3.0*\Ry);
\draw[mass line] % hide round cap
(0,\H)++(-91:{\sx*\Rx} and {\sy*\Ry}) arc(-91:-89:{\sx*\Rx} and {\sy*\Ry});
\pic[xscale=1,rotate=\ang] at (0,\H+2.6*\Ry) {rotarr};
\node[right=0] at (W3) {$\omega$};
\draw[myarr] (O) --++ (-112:{\Rx} and {\Ry})
node[below=5,left=-7,scale=0.9,opacity=0.6] {\contour{white}{$R_1$}}
node[below=5,left=-7,scale=0.9] {$R_1$};
\draw[myarr] (O) --++ (0:{\sx*\Rx} and {\sy*\Ry})
node[above=2,right=-5,scale=0.9,opacity=0.6] {\contour{white}{$R_2$}}
node[above=2,right=-5,scale=0.9] {$R_2$};
\end{tikzpicture}
% MOMENT OF INERTIA - HOLLOW CYLINDER SHELL
\begin{tikzpicture}[rotate=\ang]
\def\sx{0.88}
\def\sy{0.70}
\coordinate (O) at (0,\H);
\draw (0,0) -- (0,-2.6*\Ry);
\draw[mass,shading angle=\ang-20]
(O) ellipse({\Rx} and \Ry);
\draw[middle mass,shading angle=90+\ang]
(-\Rx,0) --++ (0,\H) arc(-180:0:{\Rx} and {\Ry}) --++ (0,-\H) arc(0:-180:{\Rx} and {\Ry});
\draw[mass,even odd rule]
(O) ellipse({\Rx} and \Ry) ellipse({\sx*\Rx} and {\sy*\Ry});
\draw (0,\H-\sy*\Ry+0.01) -- (0,\H+3.0*\Ry);
\pic[xscale=1,rotate=\ang] at (0,\H+2.6*\Ry) {rotarr};
\node[right=0] at (W3) {$\omega$};
\draw[myarr] (O) --++ (0:{0.5*(\sx+0.96)*\Rx} and {0.5*(\sy+0.96)*\Ry})
node[below=2,right=-2,scale=0.9] {$R$};
\end{tikzpicture}
% MOMENT OF INERTIA - SPHERES
\def\R{1.0} % thickness
\begin{tikzpicture}[rotate=\ang]
\coordinate (O) at (0,0);
\draw (O) -- (0,-1.3*\R);
\draw[ball color=myred] (O) circle(\R);
\draw[line width=0.6,draw=red!30!black,fill=red!40!black!10,fill opacity=0.76]
(O) circle(\R);
\draw[line cap=round] (0,0.85*\R) -- (0,1.45*\R);
\pic[xscale=1,rotate=\ang] at (0,1.3*\R) {rotarr};
\node[right=0] at (W3) {$\omega$};
\end{tikzpicture}
% MOMENT OF INERTIA - SPHERES
\def\R{1.0} % thickness
\begin{tikzpicture}[rotate=\ang]
\coordinate (O) at (0,0);
\draw[line cap=round] (0,\R) -- (0,-1.3*\R);
\draw[ball color=myred] (O) circle(\R);
\draw[opacity=0.3] (0,-\R) -- (0,-0.85*\R);
\draw[line cap=round] (0,-0.85*\R) -- (0,0.9*\R);
\draw[line width=0.6,draw=red!30!black,fill=red!40!black!10,fill opacity=0.76]
(O) circle(\R);
\draw[line cap=round] (0,0.85*\R) -- (0,1.45*\R);
\pic[xscale=1,rotate=\ang] at (0,1.3*\R) {rotarr};
\node[right=0] at (W3) {$\omega$};
\end{tikzpicture}
\end{document}
Click to download: dynamics_moment_of_inertia_mini.tex • dynamics_moment_of_inertia_mini.pdf
Open in Overleaf: dynamics_moment_of_inertia_mini.tex



