")


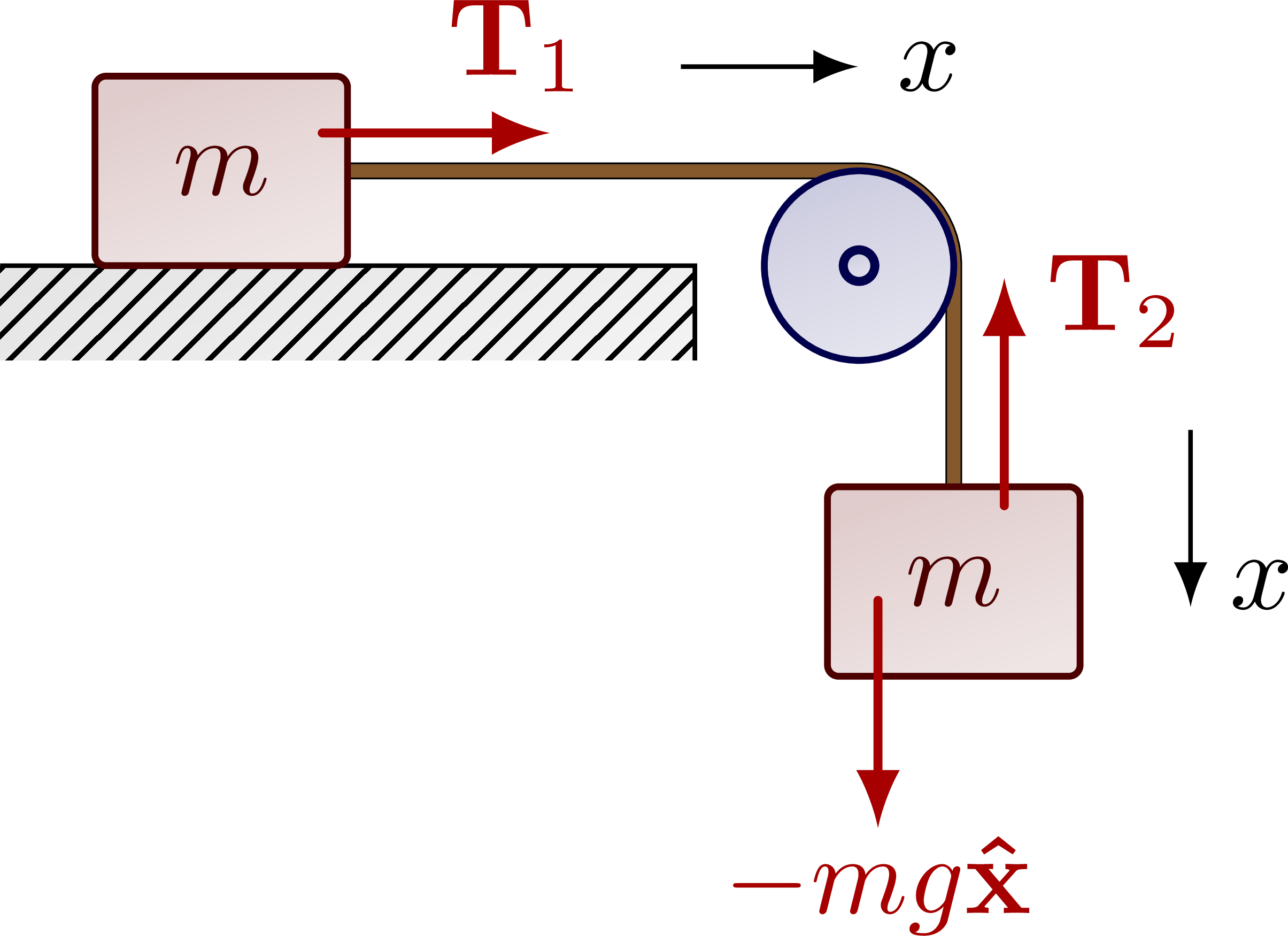
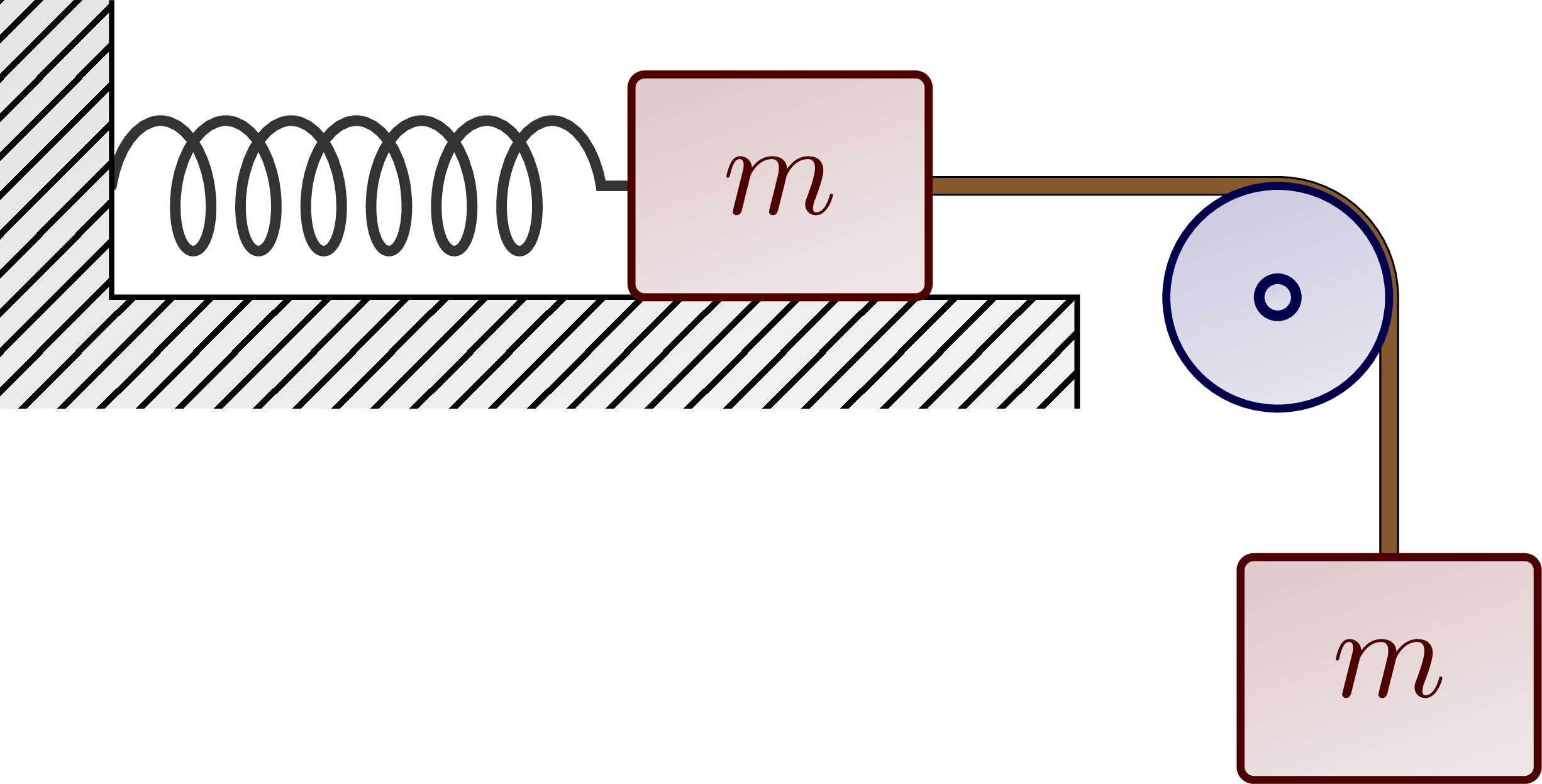
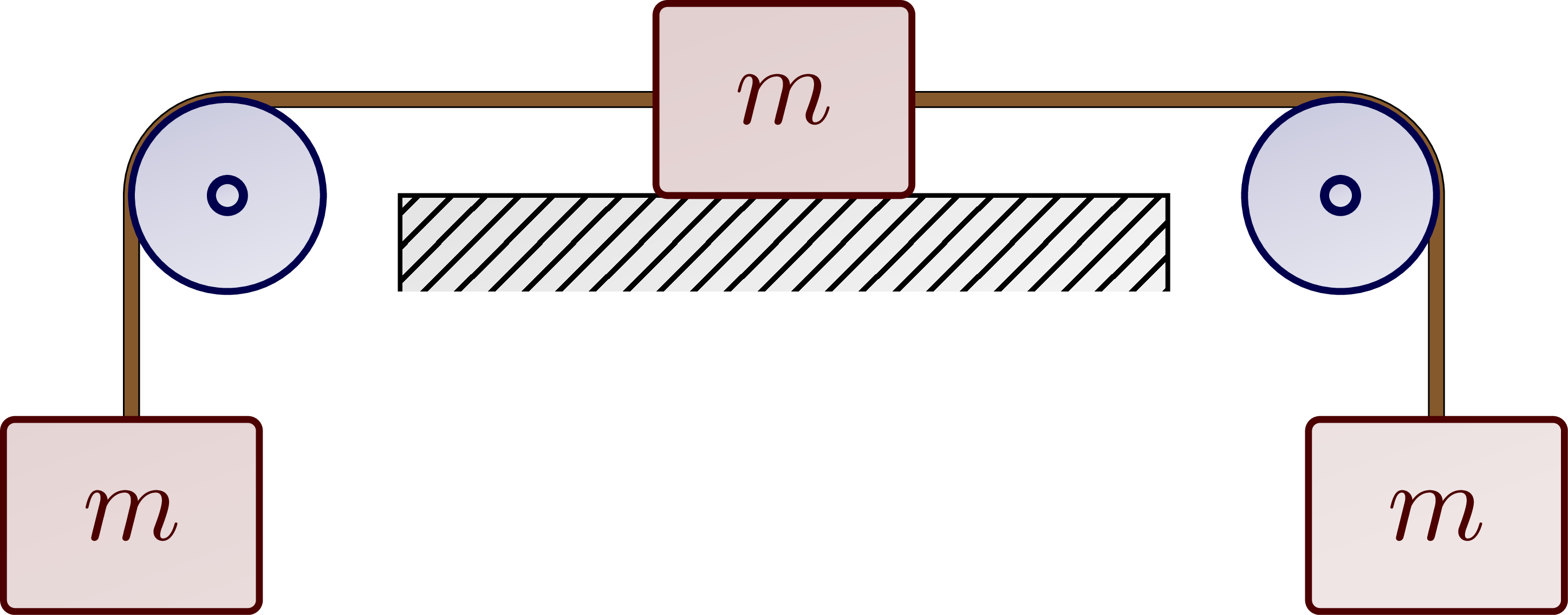
Some diagrams of basic physics problems involving masses, springs, ropes and pulleys with forces and tension. For more related figures, please see the “forces” or “Newton’s laws” tag.
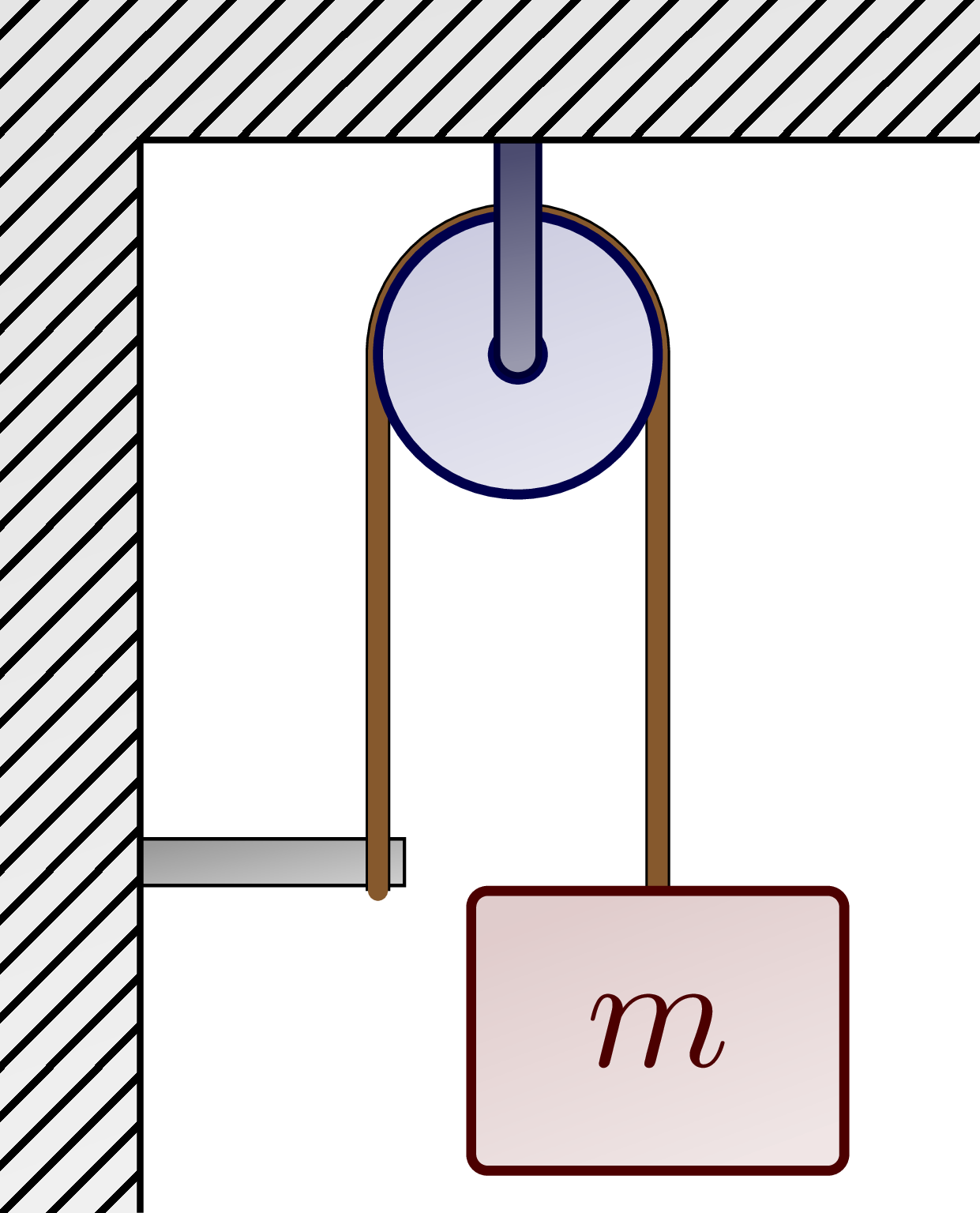
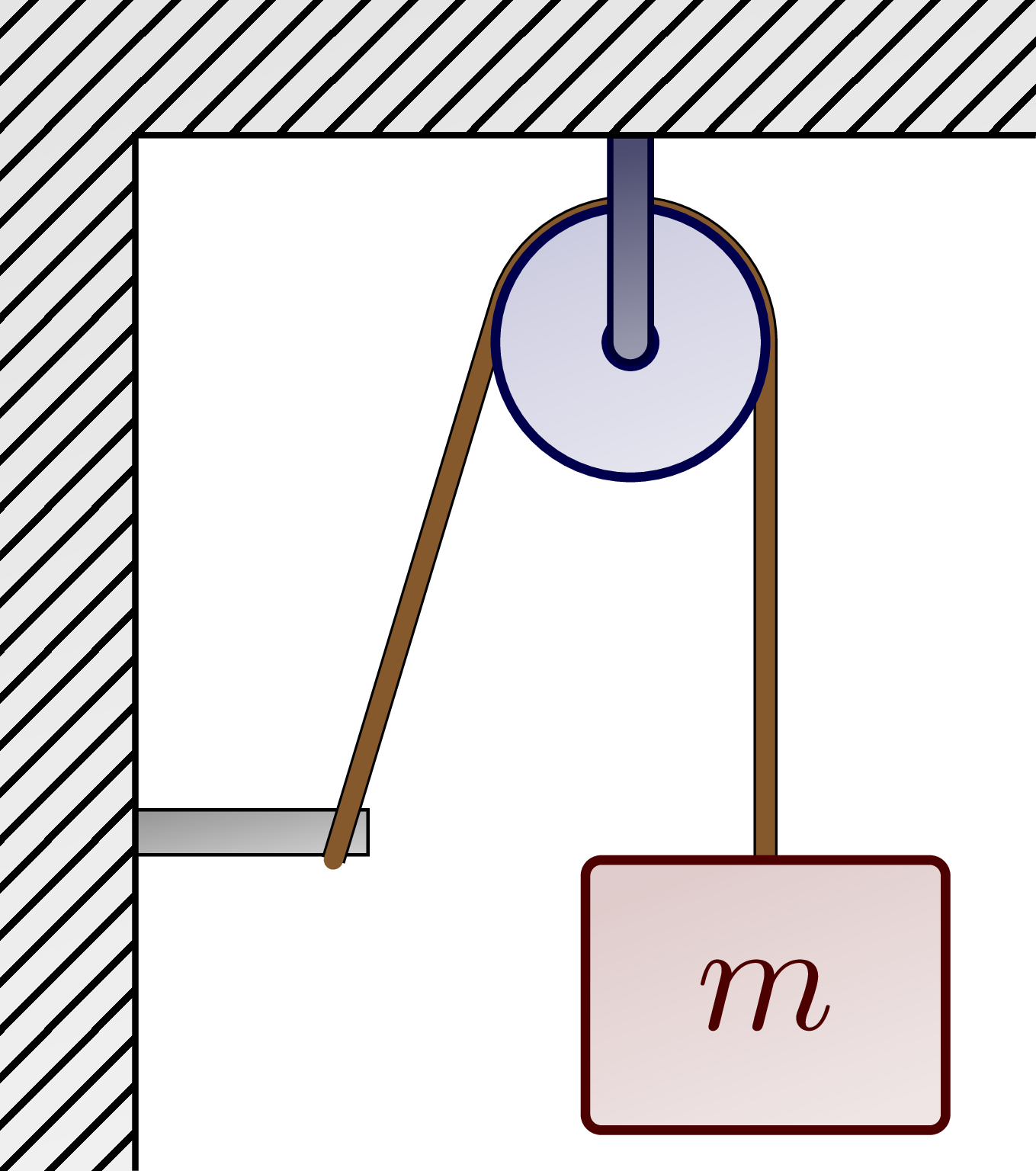
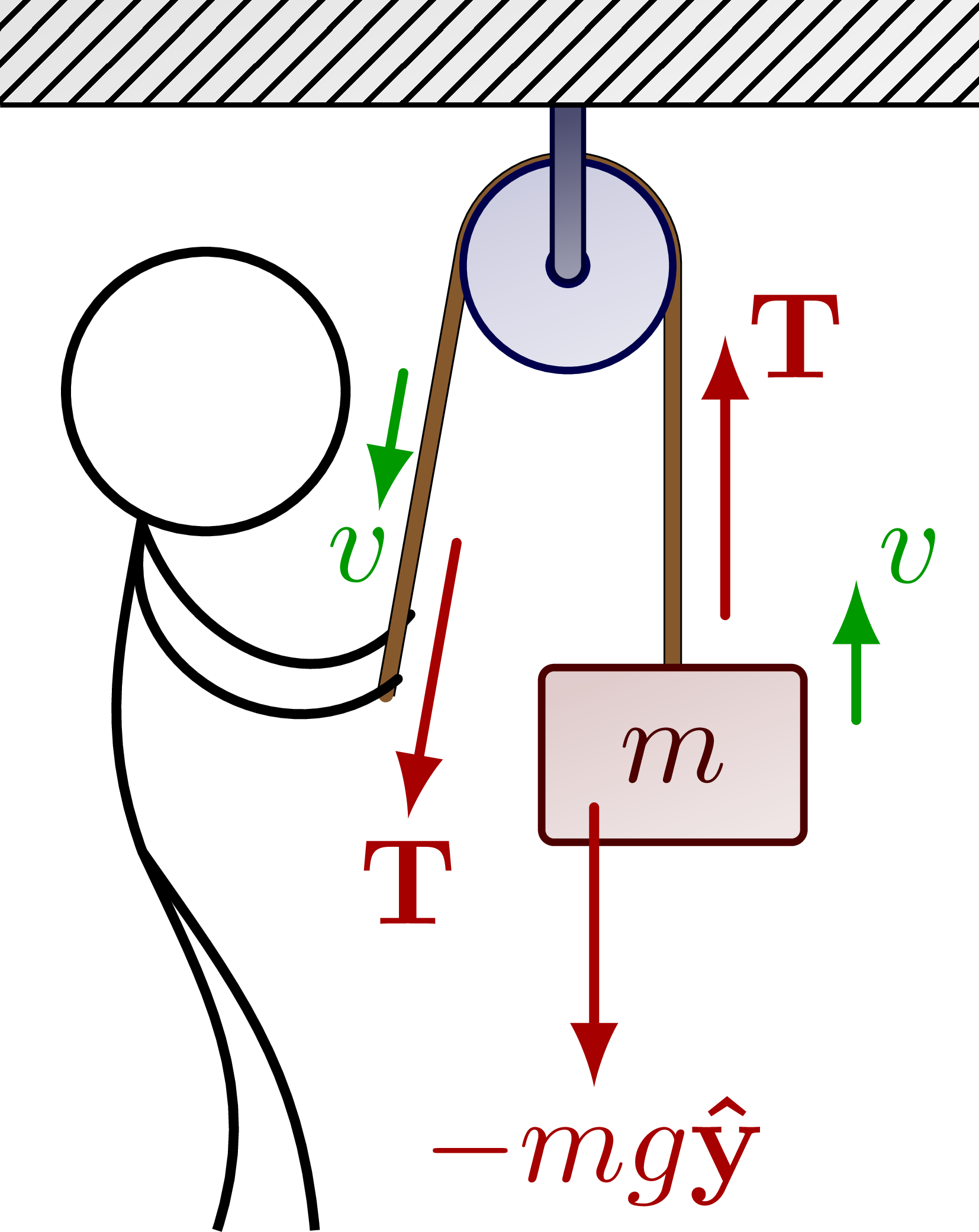
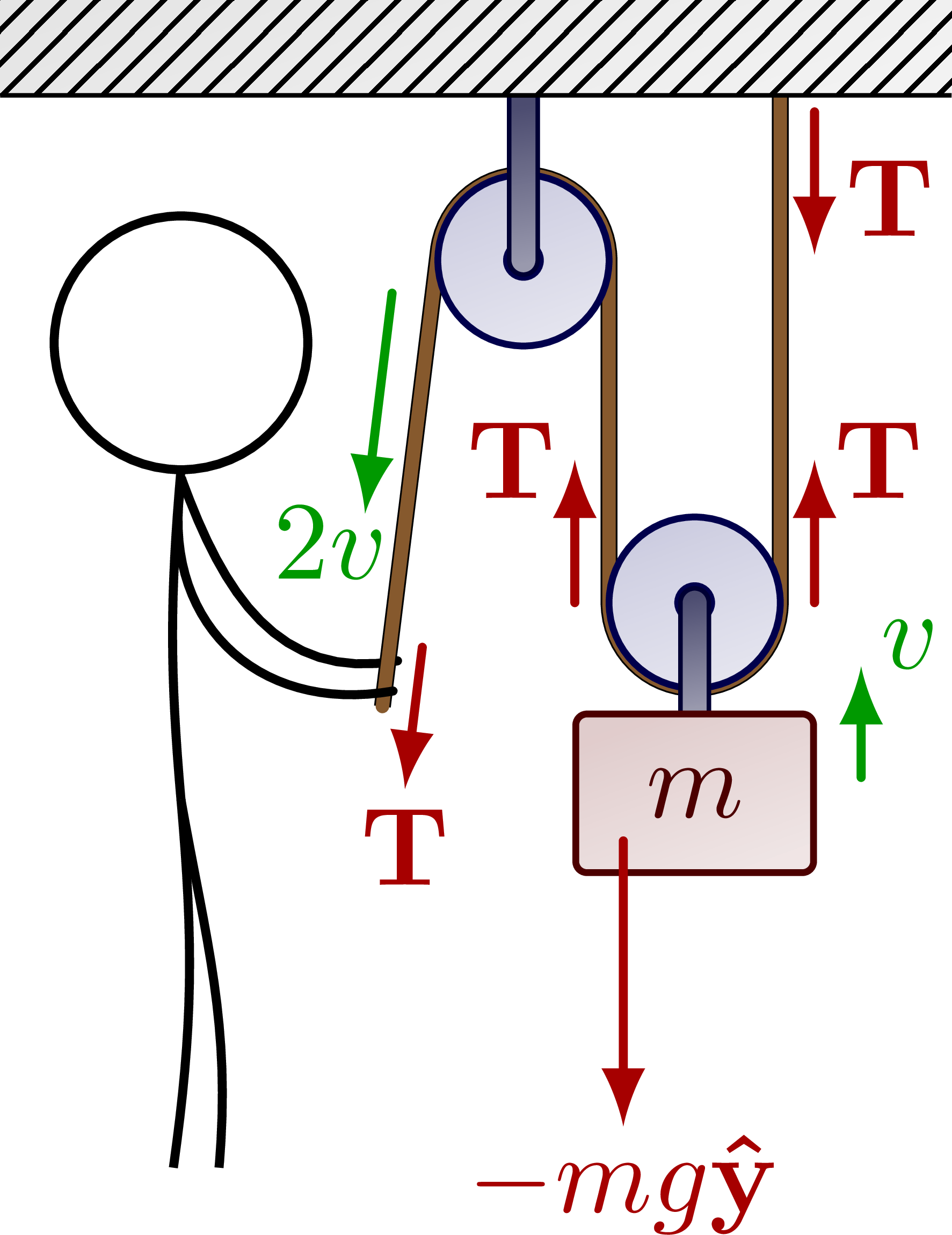
With a pulley, you can using your body weight to your advantage to make it easier to lift a mass:
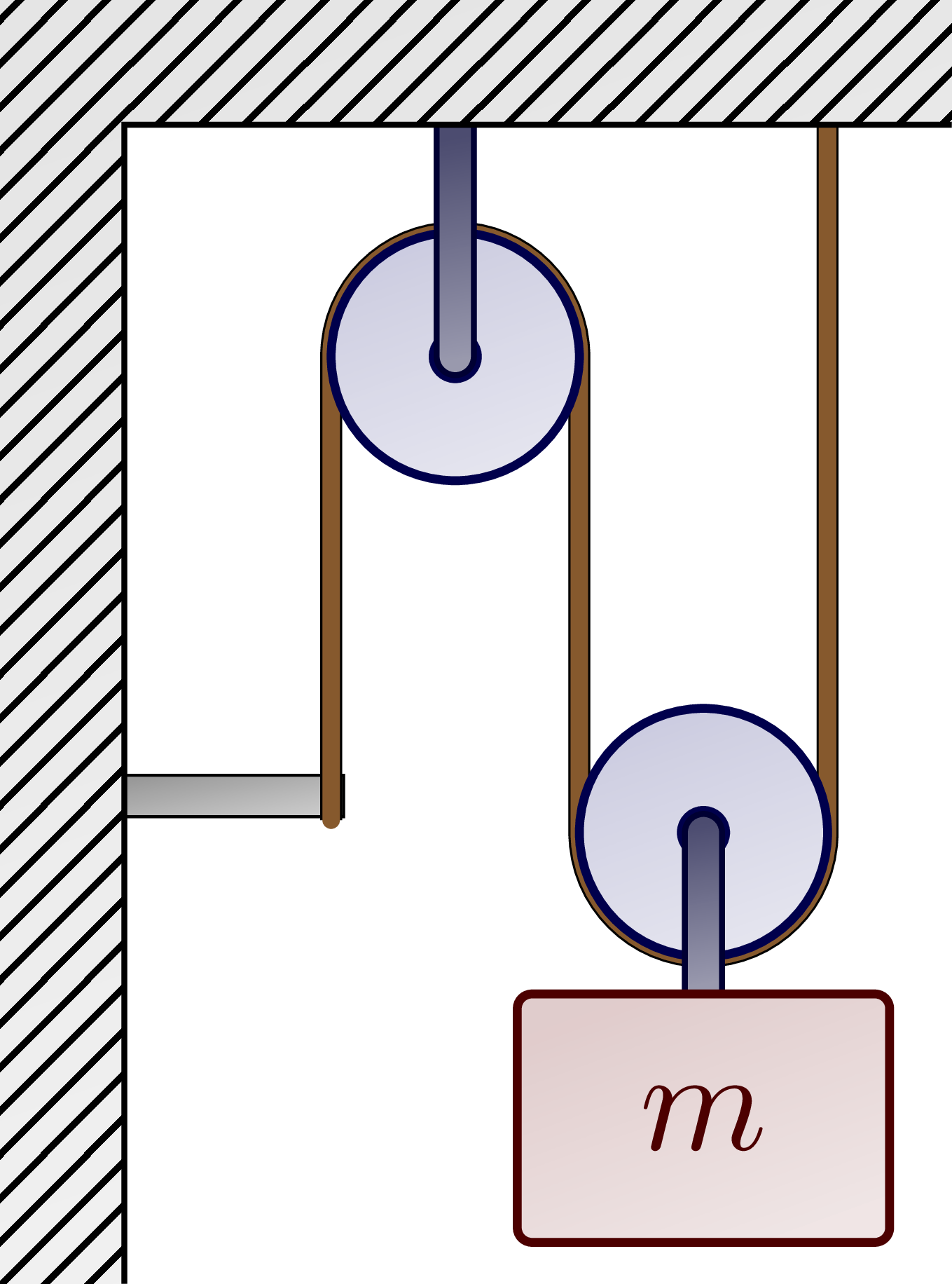
Block and tackle with a snatchblock:
Atwood machine:
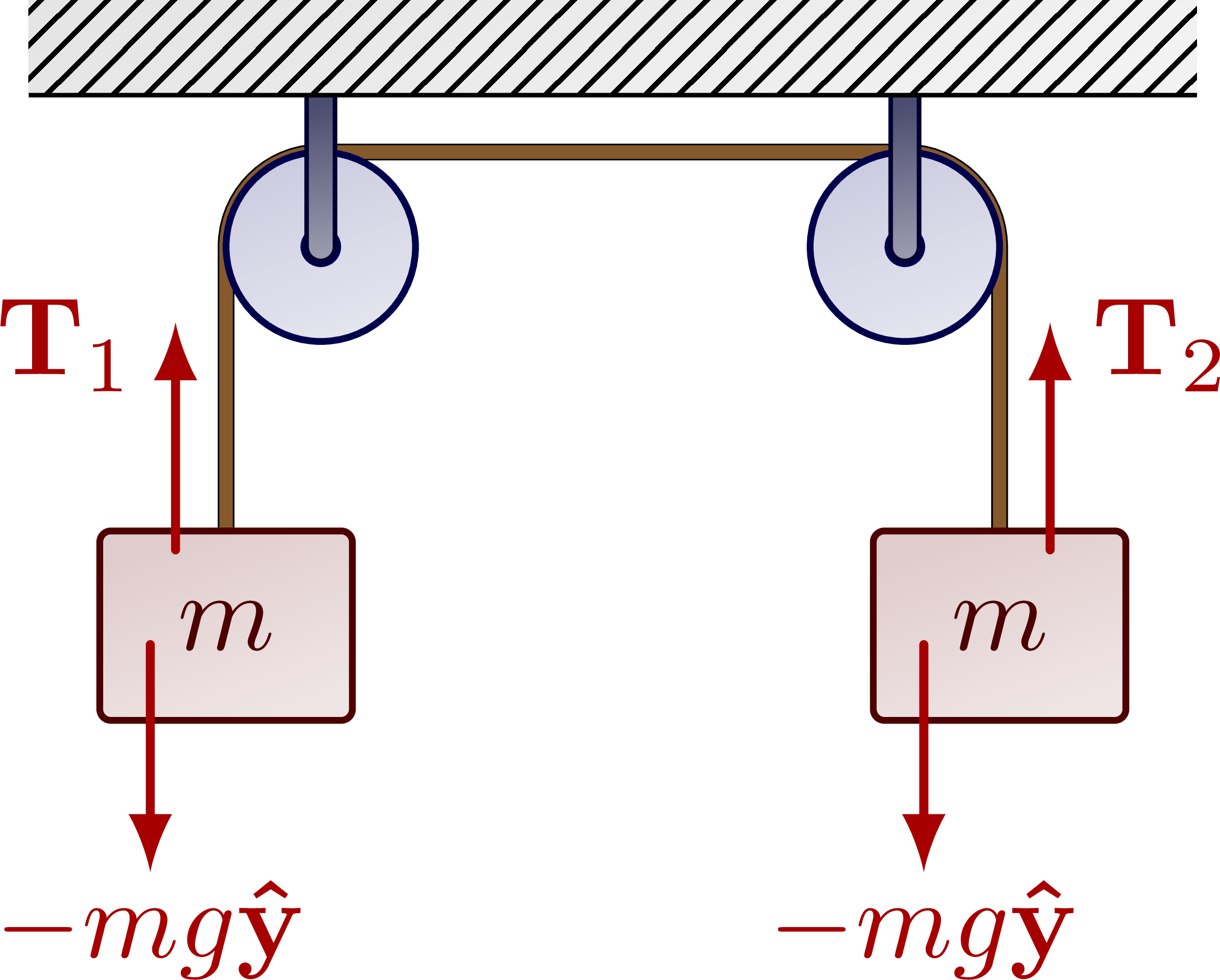
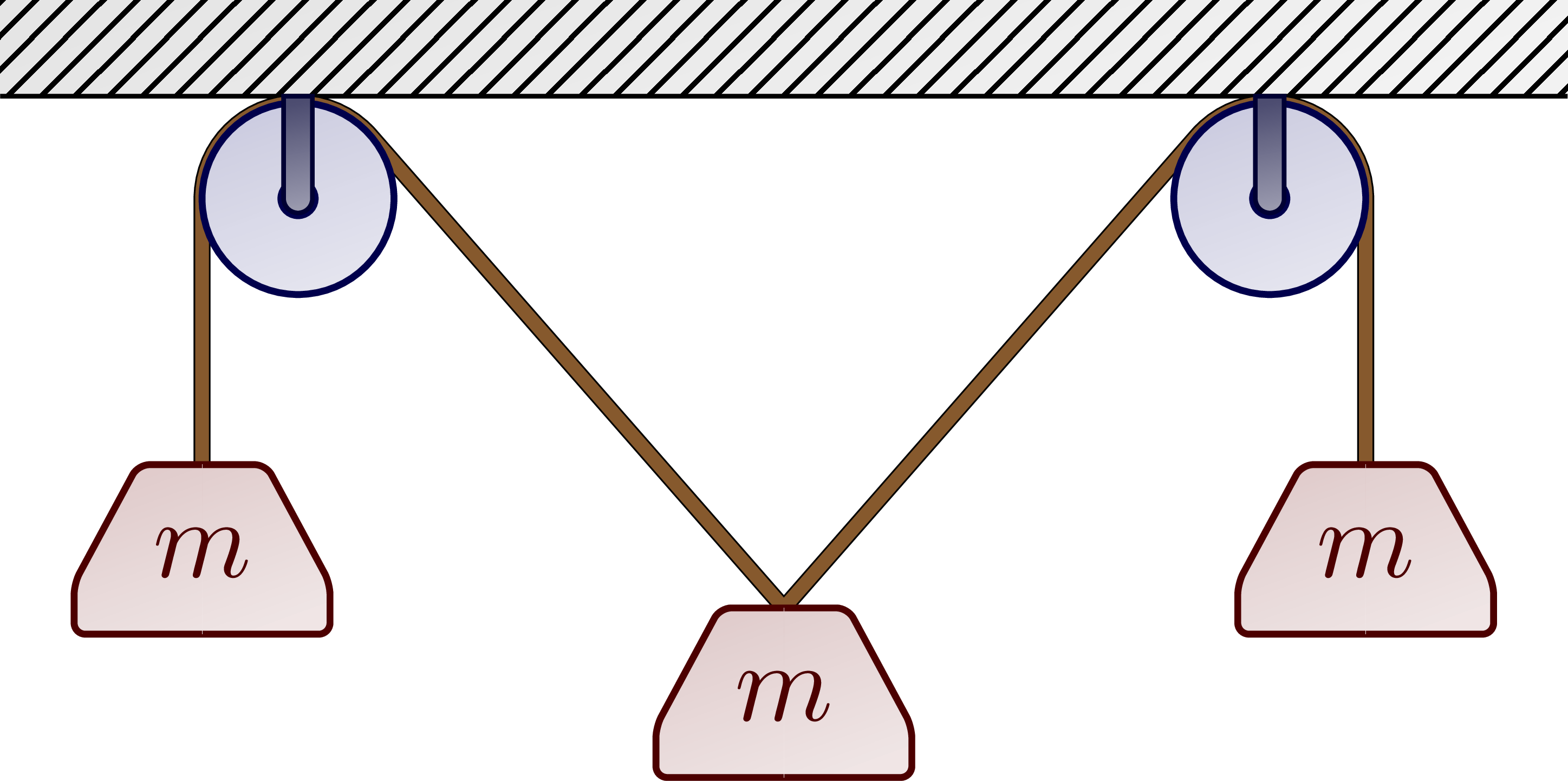
Three masses hanging from two pulleys:

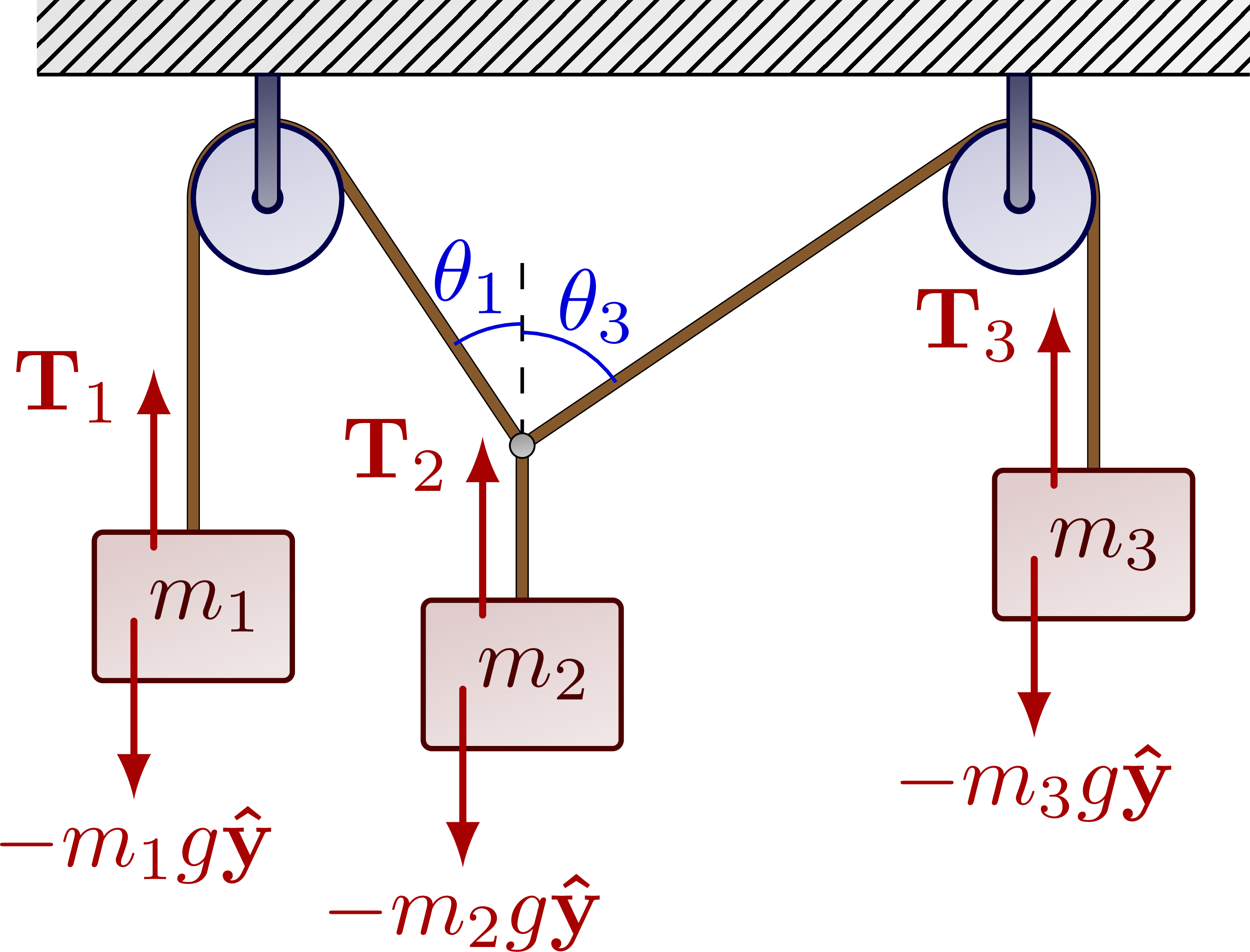
Force diagrams for the three tensions in the rope suspending the middle mass:
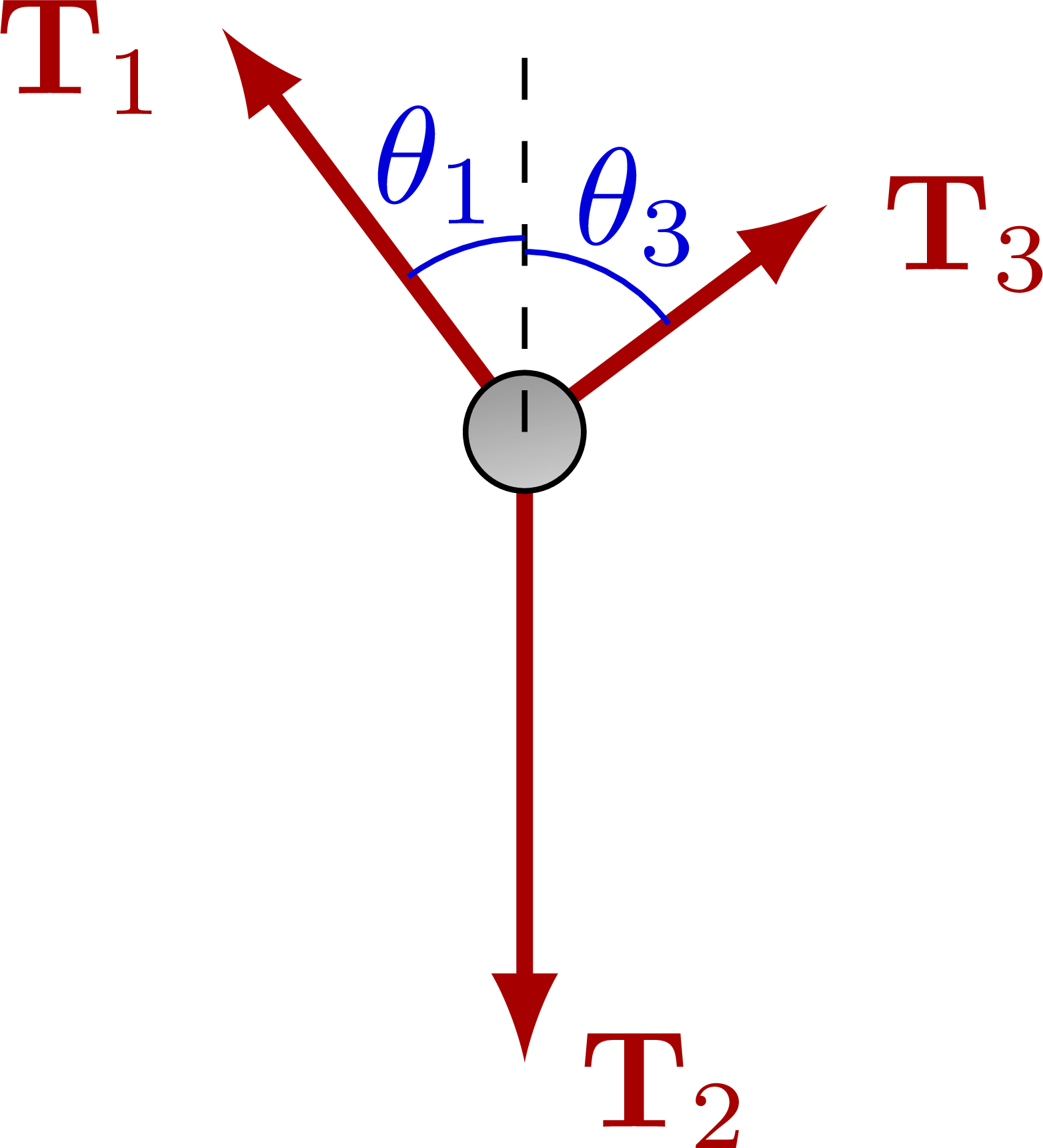
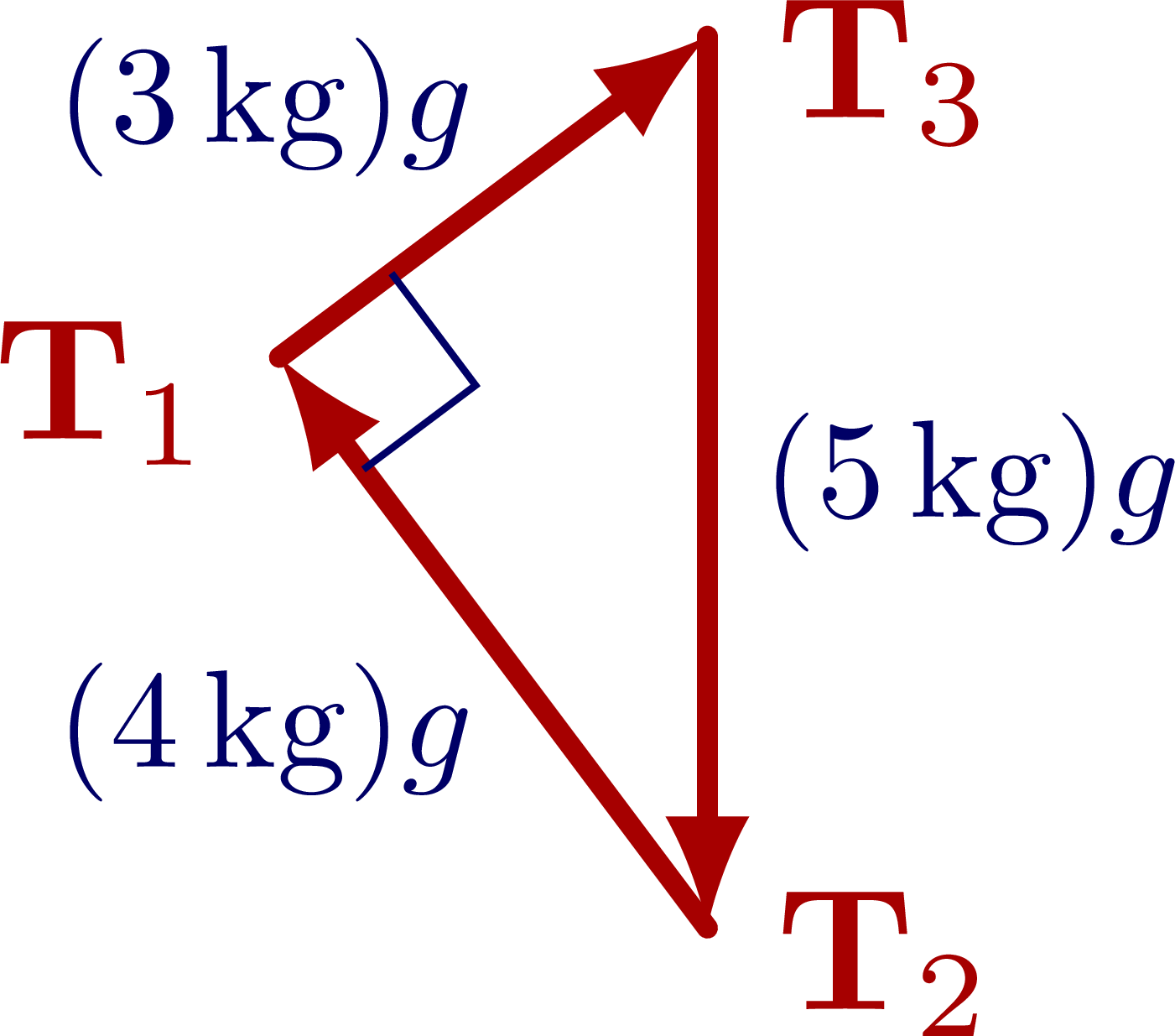
The ropes make a right angle if the tensions have a 4:5:3 ratio:
Edit and compile if you like:
% Author: Izaak Neutelings (September 2020)
% Inspiration: https://tex.stackexchange.com/questions/25531/adding-underbrace-in-tikz
\documentclass[border=3pt,tikz]{standalone}
\usepackage{physics}
\usepackage{siunitx}
\usepackage{ifthen}
\usepackage{tikz}
\usetikzlibrary{calc}
\usetikzlibrary{angles,quotes} % for pic
\usetikzlibrary{patterns,snakes}
\tikzset{>=latex} % for LaTeX arrow head
\colorlet{xcol}{blue!85!black}
\colorlet{vcol}{green!60!black}
\colorlet{myred}{red!65!black}
\tikzstyle{vvec}=[->,vcol,thick,line cap=round]
\tikzstyle{ground}=[preaction={fill,top color=black!10,bottom color=black!5,shading angle=20},
fill,pattern=north east lines,draw=none,minimum width=0.3,minimum height=0.6]
\tikzstyle{metal}=[fill,top color=black!40,bottom color=black!20,shading angle=10]
\tikzstyle{mass}=[line width=0.6,red!30!black,fill=red!40!black!10,rounded corners=1,
top color=red!40!black!20,bottom color=red!40!black!10,shading angle=20]
\tikzstyle{pulcol}=[draw=blue!30!black,%fill=blue!40!black!10
top color=blue!40!black!20,bottom color=blue!40!black!10,shading angle=20]
\tikzstyle{rope}=[brown!70!black,very thick,line cap=round]
\def\rope#1{ \draw[black,line width=1.5] #1; \draw[rope] #1; }
\tikzstyle{mount}=[blue!20!black,fill,top color=blue!20!black!70,bottom color=blue!20!black!40,shading angle=10] %,line width=1.8,line cap=round
%\tikzstyle{mount}=[color=black!60,line width=1.8,line cap=round]
\tikzstyle{spring}=[line width=0.8,black!80,snake=coil,segment amplitude=5,segment length=5,line cap=round]
\pgfdeclarelayer{back} % to draw on background
\pgfsetlayers{back,main} % set order
% FORCES SWITCH
\tikzstyle{force}=[->,myred,thick,line cap=round]
\newcommand{\vbF}{\vb{F}}
\newcommand{\vbT}{\vb{T}}
\newboolean{showforces}
\setboolean{showforces}{true}
\newcommand\rightAngle[4]{
\pgfmathanglebetweenpoints{\pgfpointanchor{#2}{center}}{\pgfpointanchor{#3}{center}}
\coordinate (tmpRA) at ($(#2)+(\pgfmathresult+45:#4)$);
%\draw[white,line width=0.6] ($(#2)!(tmpRA)!(#1)$) -- (tmpRA) -- ($(#2)!(tmpRA)!(#3)$);
\draw[blue!40!black] ($(#2)!(tmpRA)!(#1)$) -- (tmpRA) -- ($(#2)!(tmpRA)!(#3)$);
}
% PULLEY
\def\r{0.05} % pulley small radius
\tikzset{
pics/pulley/.style={
code={
\draw[pulcol,line width=0.6] (0,0) circle (#1);
\draw[pulcol,thick] (0,0) circle (\r);
}},
pics/mount/.style args={#1:#2}{ % angle, length
code={
\draw[mount] (0,0)++(#1-90:0.9*\r) arc (#1-90:#1-270:0.9*\r) --++ (#1:#2) --++ (#1-90:1.8*\r) -- cycle;
}},
pics/weight/.style args={#1,#2,#3}{ % bottom width, top width, height
code={
\draw[mass] (0,0) -- (#2/2,0) -- (#1/2,-0.7*#3)
|- (-#1/2,-#3) -- (-#1/2,-0.7*#3) -- (-#2/2,0) -- cycle;
\path[mass] (0,0) -- (0,-#3) node[pos=0.52] {$m$};
}},
pics/pulley/.default=0.3,
}
\begin{document}
% TABLE + pulley
\def\h{0.6} % mass height
\def\w{0.8} % mass width
\def\R{0.3} % pulley radius
\begin{tikzpicture}
\def\W{2.2} % ground width
\def\D{0.3} % ground depth
\def\L{0.7} % rope length
\def\p{0.6*\W+\R} % pulley x position
\draw[ground] (-\W/2,0) rectangle++ (\W,-\D);
\rope{(0,\h/2) -- (\p,\h/2) arc (90:0:\R) --++ (0,-\L) coordinate (T)}
\draw (-\W/2,0) --++ (\W,0) --++ (0,-\D);
\pic at (\p,\h/2-\R) {pulley};
\draw[mass] (-\w,0) rectangle++ (\w,\h) node[midway] {$m$};
\draw[mass] (T)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
% FORCES
\ifthenelse{\boolean{showforces}}{
\draw[->] (0.48*\W,1.05*\h) --++ (0.7*\w,0) node[right] {$x$};
\draw[->] (T)++(2.5*\R,0.3*\h) --++ (0,-0.7*\w) node[above=2,right] {$x$};
\draw[force] (-0.1*\w,0.7*\h) --++ (1.2*\h,0) node[left=3,above=0] {$\vbT_1$};
\draw[force] (T)++( 0.2*\w,-0.1*\h) --++ (0,1.2*\h) node[below=2,right=0] {$\vbT_2$};
\draw[force] (T)++(-0.3*\w,-0.6*\h) --++ (0,-1.2*\h) node[below=-3] {$-mg\vu{x}$}; %\vbF_\mathrm{g} =
}{}
\end{tikzpicture}
% TABLE + pulley spring
\begin{tikzpicture}
\def\H{0.8} % wall height
\def\T{0.3} % wall thickness
\def\W{2.6} % ground length
\def\D{0.3} % ground depth
\def\L{0.7} % rope length
\def\x{1.4} % mass width
\def\p{\W+1.8*\R} % pulley x position
\draw[spring] (0,\h/2) --++ (\x,0);
\draw[ground] (0,0) -- (0,\H) --++ (-\T,0) --++ (0,-\H-\D) --++
(\T+\W,0) -- (\W,0) -- cycle;
\draw (0,\H) -- (0,0) -- (\W,0) --++ (0,-\D);
\rope{(\x+\h,\h/2) -- (\p,\h/2) arc (90:0:\R) --++ (0,-\L) coordinate (T)}
\pic at (\p,\h/2-\R) {pulley};
\draw[mass] (\x,0) rectangle++ (\w,\h) node[midway] {$m$};
\draw[mass] (T)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\end{tikzpicture}
% TABLE double
\begin{tikzpicture}
\def\W{2.4} % ground width
\def\D{0.3} % ground depth
\def\L{0.7} % rope length
\def\pr{0.6*\W+\R} % pulley x position
\def\pl{-0.6*\W-\R} % pulley x position
\draw[ground] (-\W/2,0) rectangle++ (\W,-\D);
\draw (-\W/2,-\D) --++ (0,+\D) --++ (\W,0) --++ (0,-\D);
\rope{
(0,\h/2) -- (\pr,\h/2) arc (90:0:\R) --++ (0,-\L) coordinate (TR)
(0,\h/2) -- (\pl,\h/2) arc (90:180:\R) --++ (0,-\L) coordinate (TL)}
\pic at (\pl,\h/2-\R) {pulley};
\pic at (\pr,\h/2-\R) {pulley};
\draw[mass]
(-\w/2,0) rectangle++ (\w,\h) node[midway] {$m$}
(TL)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$}
(TR)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\end{tikzpicture}
% CEILING PULLEY - straight
\begin{tikzpicture}
\def\W{1.8} % ground width
\def\H{2.3} % ground height
\def\D{0.3} % ground depth
\def\L{0.7} % rope length
\def\t{0.1} % peg thickness
\def\R{0.30} % pulley radius
\def\px{0.45*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\my{0.30*\H} % mass y position
\def\rx{\px-1.0*\R} % rope-peg x position
\coordinate (P) at (\px,\py); % pulley
\coordinate (M) at (\px+\R,\my); % mass
\draw[metal,very thin] (0,0.305*\H) rectangle++ (1.07*\rx,\t);
\rope{ %draw[rope,line cap=round]
(\rx,0.3*\H) -- (\px-\R,\py) arc(180:0:\R) --++ (0,\my-\py)}
\pic at (P) {pulley={\R}};
\pic at (P) {mount={90:\H-\py}};
\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\draw[ground] %(0,0) rectangle++ (-\D,\H) (-\D,\H) rectangle++ (\W,\D);
(0,0) --++ (0,\H) --++ (\W,0) --++ (0,\D) --++ (-\W-\D,0) -- (-\D,0) -- cycle;
\draw (0,0) --++ (0,\H) --++ (\W,0);
\end{tikzpicture}
% CEILING PULLEY - slanted
\begin{tikzpicture}
\def\W{2.0} % ground width
\def\H{2.3} % ground height
\def\D{0.3} % ground depth
\def\L{0.7} % rope length
\def\t{0.1} % peg thickness
\def\px{0.55*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\my{0.30*\H} % mass y position
\def\rx{\px-2.2*\R} % rope-peg x position
\coordinate (P) at (\px,\py); % pulley
\coordinate (M) at (\px+\R,\my); % mass
\draw[metal,very thin] (0,0.305*\H) rectangle++ (1.07*\rx,\t);
\rope{ %[rope,line cap=round]
(\rx,0.3*\H) -- ({\px-\R*cos(19)},{\py+\R*sin(19)}) arc(161:0:\R) --++ (0,\my-\py)}
\pic at (P) {pulley};
\pic at (P) {mount={90:\H-\py}};
\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\draw[ground] %(0,0) rectangle++ (-\D,\H) (-\D,\H) rectangle++ (\W,\D);
(0,0) --++ (0,\H) --++ (\W,0) --++ (0,\D) --++ (-\W-\D,0) -- (-\D,0) -- cycle;
\draw (0,0) --++ (0,\H) --++ (\W,0);
\end{tikzpicture}
% CEILING PULLEY + ROPE
\begin{tikzpicture}
\def\W{2.0} % ceiling width
\def\H{2.5} % ceiling height
\def\D{0.3} % ceiling depth
\def\L{0.7} % rope length
\def\h{0.6} % mass height
\def\w{0.9} % mass width
\def\t{0.1} % peg thickness
\def\px{0.40*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\mx{0.70*\W} % mass x position
\def\my{0.30*\H} % mass y position
\coordinate (P) at (\px,\py); % pulley
\coordinate (M) at (\mx,\my); % mass
\draw[metal,very thin] (0,0.403*\H) rectangle++ (\px-0.9*\R,\t);
\rope{ %[rope,line cap=round]
(\px-\R,0.4*\H) -- (\px-\R,\py) arc(180:0:\R) --++ (0,\my-\py)
(\mx+0.32*\w,\H) --++ (0,\my-\H)}
\pic at (P) {pulley};
\pic at (P) {mount={90:\H-\py}};
\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\draw[ground] %(0,0) rectangle++ (-\D,\H) (-\D,\H) rectangle++ (\W,\D);
(0,0) --++ (0,\H) --++ (\W,0) --++ (0,\D) --++ (-\W-\D,0) -- (-\D,0) -- cycle;
\draw (0,0) --++ (0,\H) --++ (\W,0);
\end{tikzpicture}
% CEILING PULLEY 3
\begin{tikzpicture}
\def\W{2.0} % ceiling width
\def\H{2.8} % ceiling height
\def\D{0.3} % ceiling depth
\def\L{0.7} % rope length
\def\h{0.6} % mass height
\def\w{0.9} % mass width
\def\t{0.1} % peg thickness
\def\px{0.40*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\mx{\px+2*\R} % mass x position
\def\my{0.25*\H} % mass y position
\def\Mh{\my+1.3*\R} % pulley mount height
\coordinate (P) at (\px,\py); % pulley
\coordinate (PM) at (\mx,\Mh); % pulley on mass
\coordinate (M) at (\mx,\my); % mass
\draw[metal,very thin] (0,0.403*\H) rectangle++ (\px-0.9*\R,\t);
\rope{ %[rope,line cap=round]
(\px-\R,0.4*\H) -- (\px-\R,\py) arc(180:0:\R) -- (\mx-\R,\Mh)
arc(-180:0:\R) -- (\mx+\R,\H)}
\pic at (P) {pulley};
\pic at (P) {mount={90:\H-\py}};
\pic at (PM) {pulley};
\pic at (PM) {mount={-90:1.3*\R}};
\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\draw[ground] %(0,0) rectangle++ (-\D,\H) (-\D,\H) rectangle++ (\W,\D);
(0,0) --++ (0,\H) --++ (\W,0) --++ (0,\D) --++ (-\W-\D,0) -- (-\D,0) -- cycle;
\draw (0,0) --++ (0,\H) --++ (\W,0);
\end{tikzpicture}
% CEILING PULLEY - person
\begin{tikzpicture}
\def\W{2.8} % ground width
\def\H{2.3} % ground height
\def\D{0.3} % ground depth
\def\h{0.50} % mass height
\def\w{0.75} % mass width
\def\L{0.7} % rope length
\def\t{0.1} % peg thickness
\def\R{0.30} % pulley radius
\def\F{0.8} % force magnitude
\def\v{0.40} % velocity magnitude
\def\ang{-100} % pull angle
\def\px{0.58*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\my{0.30*\H} % mass y position
\def\rx{\px-1.0*\R} % rope-peg x position
\def\Hh{2.4} % human height
\def\Hw{0.8} % human width
\def\Hy{-0.4*\H} % human y position
\def\Hx{0.21*\W} % human x position
\coordinate (P) at (\px,\py); % pulley
\coordinate (M) at (\px+\R,\my); % mass
\coordinate (T) at ({\px+\R*sin(\ang)},{\py-\R*cos(\ang)}); % mass
\coordinate (RH) at ($(T)+(\ang:1.3)$); % right hand
% PULLEY & MASS
\rope{ %draw[rope,line cap=round]
(RH) -- (T) arc(\ang+270:0:\R) --++ (0,\my-\py)}
\pic at (P) {pulley={\R}};
\pic at (P) {mount={90:\H-\py}};
%\pic at (M) {weight={\w,0.5*\w,\h}};
\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\draw[ground] (0,\H) rectangle++ (\W,\D);
\draw (0,\H) --++ (\W,0);
% PERSON
\draw[thick] (\Hx,\Hy+\Hh) circle (0.4) coordinate (H); % head
\draw[thick,line cap=round] % body
(H)++(-117:0.4) coordinate (N) to[out=-100,in=110]++ (0,-0.40*\Hh) coordinate (B);
\begin{pgfonlayer}{back} % draw on back
\draw[thick,line cap=round] % left arm
(N)++(-85:0.03) to[out=-70,in=230,looseness=1.2] ($(RH)!0.18!(T)+(0.03,0)$);
\end{pgfonlayer}
\draw[thick,line cap=round] % right arm
(N)++(-85:0.03) to[out=-105,in=220,looseness=1.25] ($(RH)!0.02!(T)+(0.03,0.02)$);
\draw[thick] (B) to[out=-65,in=72] (\Hx+0.04*\Hw,\Hy); % left leg
\draw[thick] (B) to[out=-55,in=95] (\Hx+0.39*\Hw,\Hy); % right leg
% FORCES
\draw[vvec] (M)++(0.7*\w,-0.3*\h) --++ (0,\v) node[above=2,right=-2] {$v$};
\ifthenelse{\boolean{showforces}}{
\draw[vvec] (T)++(\ang-16:0.4) --++ (\ang:\v) node[anchor=65,inner sep=1] {$v$};
\draw[force] (RH)++(\ang+165:0.6*\F) --++ (\ang:\F) node[below=-2] {$\vbT$}; % hand
\draw[force] (M)++(0.2*\w,0.3*\h) --++ (0,\F) node[right=-2] {$\vbT$};
\draw[force] (M)++(-0.3*\w,-0.8*\h) --++ (0,-\F) node[below=-3] {$-mg\vu{y}$};
}{}
\end{tikzpicture}
% BLOCK & TACKLE with snatch block & person
% https://en.wikipedia.org/wiki/Block_and_tackle
% https://www.youtube.com/watch?v=M2w3NZzPwOM
\begin{tikzpicture}
\def\W{3.0} % ceiling width
\def\H{2.6} % ceiling height
\def\D{0.3} % ceiling depth
\def\h{0.50} % mass height
\def\w{0.75} % mass width
\def\L{0.7} % rope length
\def\t{0.08} % peg thickness
\def\F{0.45} % force magnitude
\def\v{0.35} % velocity magnitude
\def\ang{-97} % pull angle
\def\R{0.27} % pulley radius
\def\px{0.55*\W} % pulley x position
\def\py{0.8*\H} % pulley y position
\def\mx{\px+2*\R} % mass x position
\def\my{0.25*\H} % mass y position
\def\Mh{\my+1.3*\R} % pulley mount height
\def\Hh{2.6} % human height
\def\Hw{0.8} % human width
\def\Hy{-0.3*\H} % human y position
\def\Hx{ 0.19*\W} % human x position
\coordinate (P) at (\px,\py); % pulley
\coordinate (PM) at (\mx,\Mh); % pulley on mass
\coordinate (M) at (\mx,\my); % mass
\coordinate (T) at ({\px+\R*sin(\ang)},{\py-\R*cos(\ang)}); % mass
\coordinate (RH) at ($(T)+(\ang:1.45)$); % right hand
% PULLEY & MASS
\rope{ %[rope,line cap=round]
(RH) -- (T) arc(\ang+270:0:\R) -- (\mx-\R,\Mh)
arc(-180:0:\R) -- (\mx+\R,\H)}
\pic at (P) {pulley={\R}};
\pic at (P) {mount={90:\H-\py}};
\pic at (PM) {pulley={\R}};
\pic at (PM) {mount={-90:1.3*\R}};
%\pic at (M) {weight={\w,0.5*\w,\h}};
\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\draw[ground] (0,\H) rectangle++ (\W,\D);
\draw (0,\H) --++ (\W,0);
% PERSON
\draw[thick] (\Hx,\Hy+\Hh) circle (0.4) coordinate (H); % head
\draw[thick] % body
(H)++(0,-0.4) coordinate (N) to[out=-95,in=95]++ (0,-0.40*\Hh) coordinate (B);
\begin{pgfonlayer}{back} % draw in back
\draw[thick,line cap=round] % left arm
(N)++(-85:0.03) to[out=-70,in=190,looseness=1.1] ($(RH)!0.1!(T)+(0.03,0)$);
\end{pgfonlayer}
\draw[thick,line cap=round] % right arm
(N)++(-85:0.03) to[out=-100,in=190,looseness=1.2] ($(RH)!0.02!(T)+(0.03,0.02)$);
\draw[thick] (B) to[out=-85,in=82] (\Hx-0.03*\Hw,\Hy); % left leg
\draw[thick] (B) to[out=-80,in=85] (\Hx+0.15*\Hw,\Hy); % right leg
% FORCES
\draw[vvec] (M)++(0.7*\w,-0.4*\h) --++ (0,\v) node[above=2,right=-2] {$v$};
\ifthenelse{\boolean{showforces}}{
\draw[vvec] (T)++(\ang-40:0.2) --++ (\ang:2*\v) node[anchor=40,inner sep=-1] {$2v$};
\draw[force] (RH)++(\ang+153:0.5*\F) --++ (\ang:\F) node[below=-2] {$\vbT$}; % hand
\draw[force] (\mx-1.4*\R,\Mh) --++ (0,\F) node[left=-2] {$\vbT$}; % mass pulley left
\draw[force] (\mx+1.4*\R,\Mh) --++ (0,\F) node[right=-2] {$\vbT$}; % mass pulley right
\draw[force] (\mx+1.4*\R,0.98*\H) --++ (0,-\F) node[pos=0.6,right=-1] {$\vbT$}; % hand
\draw[force] (M)++(-0.3*\w,-0.8*\h) --++ (0,-2*\F) node[below=-3] {$-mg\vu{y}$};
}{}
\end{tikzpicture}
% CEILING PULLEY - two masses
\begin{tikzpicture}
\def\W{3.7} % ceiling width
\def\H{2.4} % ceiling height
\def\D{0.3} % ceiling depth
\def\px{0.25*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\mx{\px+\R} % mass x position
\def\my{0.30*\H} % mass y position
\coordinate (PL) at (-\px,\py); % pulley
\coordinate (PR) at ( \px,\py); % pulley
\coordinate (ML) at ({-(\mx)},\my); % mass
\coordinate (MR) at ( \mx,\my); % mass
\rope{ %[rope]
(ML) -- (-\px-\R,\py) arc (180:90:\R) -- (\px,\py+\R) arc (90:0:\R) -- (MR)}
\pic at (PL) {pulley};
\pic at (PR) {pulley};
\pic at (PR) {mount={90:\H-\py}};
\pic at (PL) {mount={90:\H-\py}};
\draw[mass] (ML)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {$m$};
\draw[mass] (MR)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {$m$};
\draw[ground] (-\W/2,\H) rectangle++ (\W,\D);
\draw (-\W/2,\H) --++ (\W,0);
% FORCES
\ifthenelse{\boolean{showforces}}{
%\draw[->] (ML)++(-1.0*\w,-0.5*\h) --++ (0.7*\w,0) node[right] {$y$};
%\draw[->] (T)++(2.5*\R,0.3*\h) --++ (0,-0.7*\w) node[above=2,right] {$x$};
%\draw[force] (-0.1*\w,0.7*\h) --++ (1.2*\h,0) node[left=3,above=0] {$\vbT_1$};
\draw[force] (ML)++(-0.2*\w, 0.4*\h) --++ (0, 1.2*\h) node[below=2,left=0] {$\vbT_1$};
\draw[force] (MR)++( 0.2*\w, 0.4*\h) --++ (0, 1.2*\h) node[below=2,right=0] {$\vbT_2$};
\draw[force] (ML)++(-0.3*\w,-0.1*\h) --++ (0,-1.2*\h) node[below=-3] {$-mg\vu{y}$}; %\vbF_\mathrm{g} =
\draw[force] (MR)++(-0.3*\w,-0.1*\h) --++ (0,-1.2*\h) node[below=-3] {$-mg\vu{y}$};
}{}
\end{tikzpicture}
% CEILING PULLEY - three masses with joint
\def\W{4.9} % ceiling width
\def\H{1.6} % ceiling height
\def\D{0.3} % ceiling depth
\def\R{0.30} % pulley radius
\def\px{0.31*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\mx{\px+\R} % mass x position
\def\my{0.28*\H} % mass y position
\begin{tikzpicture}
\def\h{0.53} % mass height
\def\ang{48} % rope angle
\coordinate (PL) at (-\px,\py); % pulley
\coordinate (PR) at ( \px,\py); % pulley
\coordinate (ML) at ({-(\mx)},\my); % mass
\coordinate (MR) at ( \mx,\my); % mass
\coordinate (X) at (0,1.1*\my); % rope joint
\coordinate (M) at (0,0); % mass
\draw[ground] (-\W/2,\H) rectangle++ (\W,\D);
\draw (-\W/2,\H) --++ (\W,0);
\rope{ %[rope]
(ML) -- (-\px-\R,\py) arc (180:\ang:\R)
-- (X) -- ({\px-\R*cos(\ang)},{\py+\R*sin(\ang)}) arc (180-\ang:0:\R) -- (MR)
(X) -- (M)}
\pic at (PL) {pulley};
\pic at (PR) {pulley};
\pic at (PR) {mount={90:\H-\py}};
\pic at (PL) {mount={90:\H-\py}};
\pic at (ML) {weight={\w,0.5*\w,\h}};
\pic at (MR) {weight={\w,0.5*\w,\h}};
\pic at (M) {weight={\w,0.5*\w,\h}};
%\draw[mass] (ML)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {$m$};
%\draw[mass] (MR)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {$m$};
%\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\end{tikzpicture}
% CEILING PULLEY - three masses without joint
\begin{tikzpicture}
\def\h{0.53} % mass height
\def\ang{42} % rope angle
\coordinate (PL) at (-\px,\py); % pulley
\coordinate (PR) at ( \px,\py); % pulley
\coordinate (ML) at ({-(\mx)},\my); % mass
\coordinate (MR) at ( \mx,\my); % mass
\coordinate (M) at (0,0); % mass
\draw[ground] (-\W/2,\H) rectangle++ (\W,\D);
\draw (-\W/2,\H) --++ (\W,0);
\rope{ %[rope]
(ML) -- (-\px-\R,\py) arc (180:\ang:\R)
-- (M) -- ({\px-\R*cos(\ang)},{\py+\R*sin(\ang)}) arc (180-\ang:0:\R) -- (MR)}
\pic at (PL) {pulley};
\pic at (PR) {pulley};
\pic at (PR) {mount={90:\H-\py}};
\pic at (PL) {mount={90:\H-\py}};
\pic at (ML) {weight={\w,0.5*\w,\h}};
\pic at (MR) {weight={\w,0.5*\w,\h}};
\pic at (M) {weight={\w,0.5*\w,\h}};
%\draw[mass] (ML)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {$m$};
%\draw[mass] (MR)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {$m$};
%\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
\end{tikzpicture}
% CEILING PULLEY - three unequal masses
\begin{tikzpicture}
\def\W{4.9} % ceiling width
\def\H{2.5} % ceiling height
\def\D{0.3} % ceiling depth
\def\px{0.31*\W} % pulley x position
\def\py{0.80*\H} % pulley y position
\def\mx{\px+\R} % mass x position
\def\my{0.20*\H} % mass y position
\coordinate (PL) at (-\px,\py); % pulley
\coordinate (PR) at ( \px,\py); % pulley
\coordinate (ML) at ({-(\mx)},0.7*\my); % mass
\coordinate (MR) at ( \mx,1.2*\my); % mass
\coordinate (X) at (-0.1*\W,0.40*\H); % mass
\coordinate (M) at (-0.1*\W,0.15*\H); % mass
\draw[ground] (-\W/2,\H) rectangle++ (\W,\D);
\draw (-\W/2,\H) --++ (\W,0);
\rope{ %[rope]
(ML) -- (-\px-\R,\py) arc (180:35:\R) coordinate (PLT)
-- (X) -- ({\px-\R*cos(55)},{\py+\R*sin(55)}) coordinate (PRT) arc (125:0:\R) -- (MR)
(X) -- (M)}
\pic at (PL) {pulley};
\pic at (PR) {pulley};
\pic at (PR) {mount={90:\H-\py}};
\pic at (PL) {mount={90:\H-\py}};
\draw[mass] (ML)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {\;$m_1$};
\draw[mass] (MR)++(-\w/2,-\h/2) rectangle++ (\w,\h) node[midway] {\;$m_3$};
\draw[mass] (M)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {\;$m_2$};
%\rightAngle{PLT}{X}{PRT}{0.4}
\draw[dashed] (X) --++ (0,0.3*\H) coordinate (T);
\draw pic["$\theta_1$",xcol,draw=xcol,angle radius=14,angle eccentricity=1.45] {angle=T--X--PLT};
\draw pic["$\theta_3$",xcol,draw=xcol,angle radius=13,angle eccentricity=1.40] {angle=PRT--X--T};
% FORCES
\ifthenelse{\boolean{showforces}}{
\draw[force] (ML)++(-0.2*\w, 0.4*\h) --++ (0, 1.2*\h) node[below=2,left=0] {$\vbT_1$};
\draw[force] (M)++( -0.2*\w,-0.1*\h) --++ (0, 1.2*\h) node[below=2,left=0] {$\vbT_2$};
\draw[force] (MR)++(-0.2*\w, 0.4*\h) --++ (0, 1.2*\h) node[below=2,left=0] {$\vbT_3$};
\draw[force] (ML)++(-0.3*\w,-0.1*\h) --++ (0,-1.2*\h) node[below=-3] {$-m_1g\vu{y}$};
\draw[force] (M)++( -0.3*\w,-0.6*\h) --++ (0,-1.2*\h) node[below=-3] {$-m_2g\vu{y}$};
\draw[force] (MR)++(-0.3*\w,-0.1*\h) --++ (0,-1.2*\h) node[below=-3] {$-m_3g\vu{y}$};
\draw[very thin,metal] (X) circle (0.05);
}{}
\end{tikzpicture}
% CEILING PULLEY - three unequal masses - forces
\begin{tikzpicture}
\def\F{1.6}
\coordinate (O) at (0,0);
\draw[force,very thick] (O) -- ({acos(4/5)+90}:4/5*\F) coordinate (F1) node[below=2,left=0] {$\vbT_1$};
\draw[force,very thick] (O) -- ({acos(4/5)}:3/5*\F) coordinate (F3) node[below=2,right=0] {$\vbT_3$};
\draw[force,very thick] (O) -- (-90:\F) node[below=2,right=0] {$\vbT_2$};
\draw[thin,metal] (O) circle (0.15);
%\rightAngle{F1}{O}{F3}{0.4}
\draw[dashed] (O) --++ (0,0.6*\F) coordinate (T);
\draw pic["$\theta_1$",xcol,draw=xcol,angle radius=14,angle eccentricity=1.45] {angle=T--O--F1};
\draw pic["$\theta_3$",xcol,draw=xcol,angle radius=13,angle eccentricity=1.40] {angle=F3--O--T};
\end{tikzpicture}
% CEILING PULLEY - three unequal masses - forces triangle
\begin{tikzpicture}
\def\F{1.8}
\coordinate (O) at (0,0);
\draw[force,very thick] (O) -- ({acos(4/5)+90}:4/5*\F) coordinate (F1)
node[blue!40!black,midway,below left=-2,scale=0.8] {$(\SI{4}{kg})g$} node[below=2,left=0] {$\vbT_1$};
\draw[force,very thick] (F1) -- (90:\F) coordinate (F3)
node[blue!40!black,midway,above left=-2,scale=0.8] {$(\SI{3}{kg})g$} node[below=2,right=0] {$\vbT_3$};
\draw[force,very thick] (F3) -- (O)
node[blue!40!black,midway,right=0,scale=0.8] {$(\SI{5}{kg})g$} node[below=2,right=0] {$\vbT_2$};
\rightAngle{F3}{F1}{O}{0.4}
\end{tikzpicture}
\end{document}
Click to download: dynamics_pulley.tex • dynamics_pulley.pdf
Open in Overleaf: dynamics_pulley.tex




Amazing work. The code is the one for springs not pulleys
Hey bergmad, You
arewere right. It’s fixed now. 🙂Thanks for letting us know!
Izaak
I modified your tikz code to produce the image on my blog. Many thanks. Saved me a day (or more)!
I changed the first code, a little less elegant, but the pulley was not scaling up when I needed to
\def\scale{1.8} % scale factor
\def\h{0.6} % mass height (base value)
\def\w{0.8} % mass width (base value)
\def\R{0.3} % pulley radius (base value)
\begin{tikzpicture}[scale=\scale]
\def\W{2.2} % ground width (base value)
\def\D{0.3} % ground depth (base value)
\def\L{0.7} % rope length (base value)
\def\p{0.6*\W+\R} % pulley x position
\draw[ground] (-\W/2,0) rectangle++ (\W,-\D);
\rope{(0,\h/2) — (\p,\h/2) arc (90:0:\R) –++ (0,-\L) coordinate (T)}
\draw (-\W/2,0) –++ (\W,0) –++ (0,-\D);
% Draw pulley directly (no pic)
\begin{scope}[shift={(\p,\h/2-\R)}]
% Outer wheel
\draw[pulcol, line width=0.6] (0,0) circle (\R);
% Inner hub
\draw[pulcol, thick] (0,0) circle (0.167*\R);
% Axle hole
\fill[pulcol] (0,0) circle (0.05*\R);
\end{scope}
\draw[mass] (-\w,0) rectangle++ (\w,\h) node[midway] {$m$};
\draw[mass] (T)++(-\w/2,0) rectangle++ (\w,-\h) node[midway] {$m$};
% FORCES
\ifthenelse{\boolean{showforces}}{
\draw[->] (T)++(2.5*\R,0.3*\h) –++ (0,-0.7*\w) node[above=2,right] {$a$};
\draw[force] (-0.1*\w,0.7*\h) –++ (1.2*\h,0) node[left=3,above=0] {$\vbT_1$};
\draw[force] (T)++( 0.2*\w,-0.1*\h) –++ (0,1.2*\h) node[below=2,right=0] {$\vbT_2$};
\draw[force] (T)++(-0.3*\w,-0.6*\h) –++ (0,-1.2*\h) node[below=-3] {$\vbW$};
}{}
\end{tikzpicture}
I modified a few variable to use in my presentation, but now the pulley scales
Thanks for sharing your work! It is greatly appreciated!