")


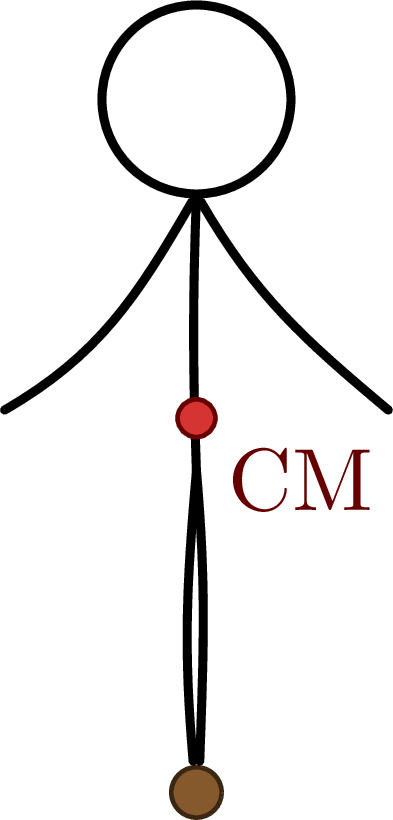
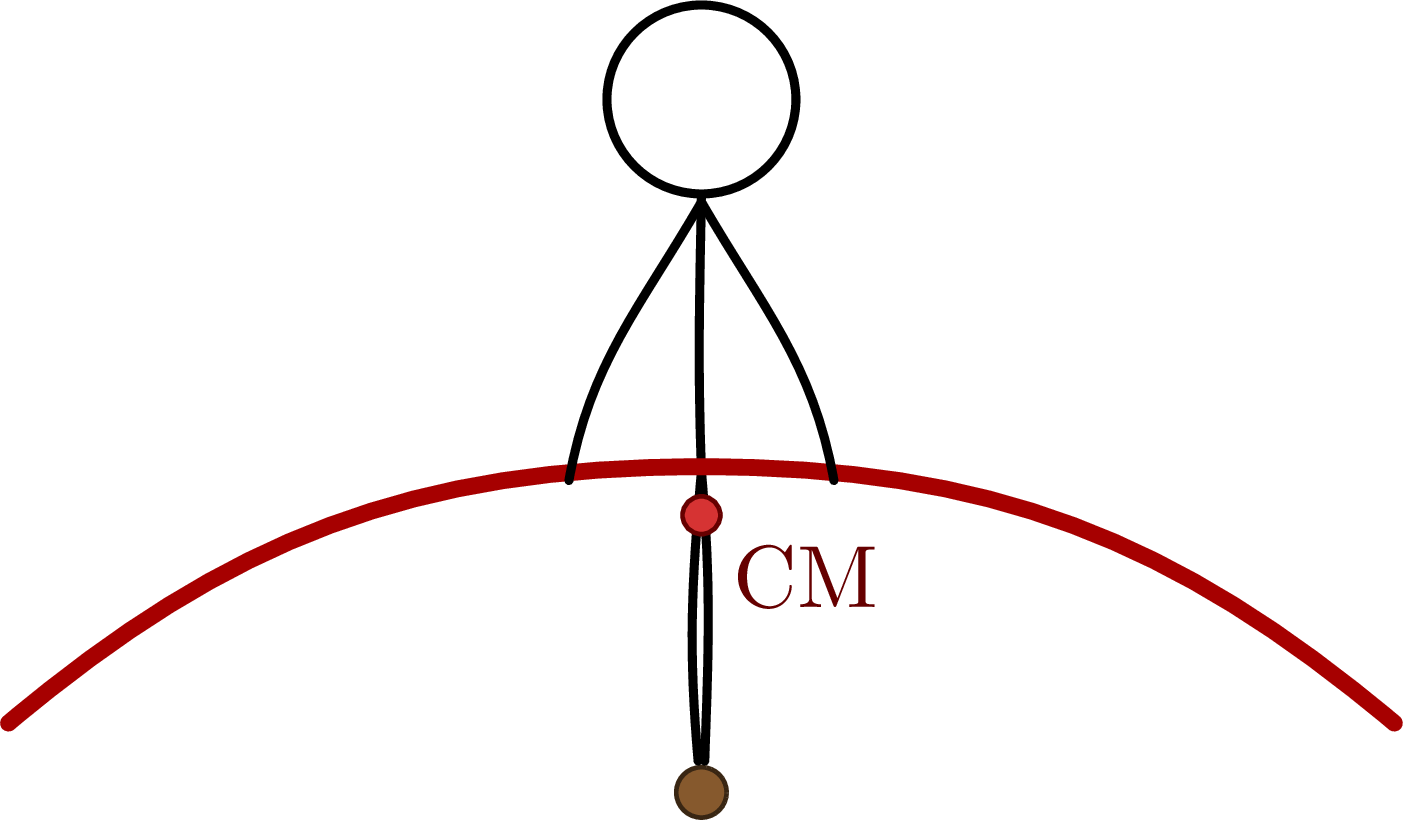
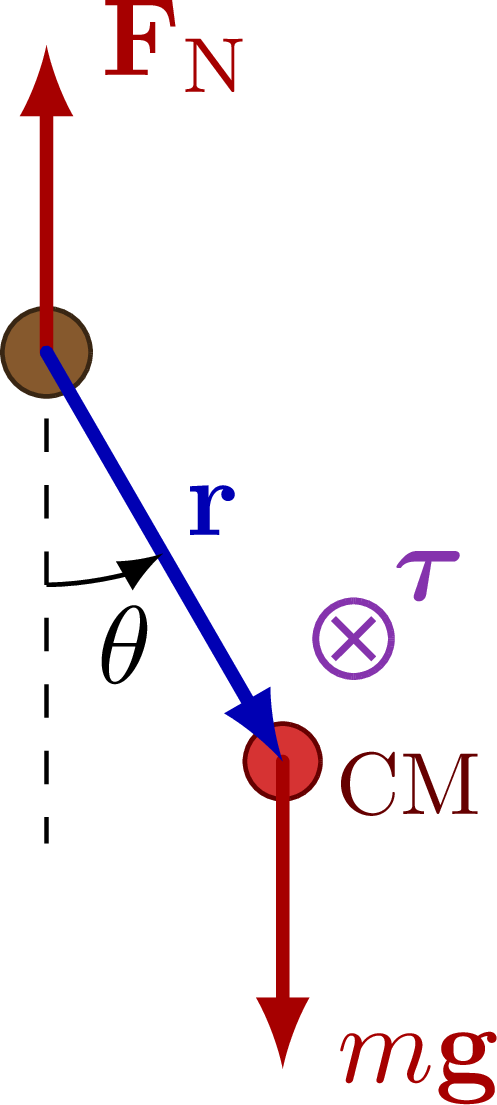
Study of the stability of a tightrope walker via moment of inertia, center of mass, and a restoring torque.
For more on stability, see the “stability” tag. These figures are used in Ben Kilminster’s lecture notes for PHY111.

Edit and compile if you like:
% Author: Izaak Neutelings (October 2020)
% Inspiration: https://tex.stackexchange.com/questions/25531/adding-underbrace-in-tikz
\documentclass[border=3pt,tikz]{standalone}
\usepackage{physics}
\usepackage{tikz}
\usetikzlibrary{calc}
\usetikzlibrary{angles,quotes} % for pic
\tikzset{>=latex} % for LaTeX arrow head
\colorlet{xcol}{blue!70!black}
\colorlet{vcol}{green!60!black}
\colorlet{myred}{red!65!black}
\colorlet{mypurple}{blue!60!red!80}
\colorlet{acol}{red!50!blue!80!black!80}
\tikzstyle{CM}=[red!40!black,fill=red!80!black!80]
\tikzstyle{rvec}=[->,xcol,very thick,line cap=round]
\tikzstyle{force}=[->,myred,very thick,line cap=round]
\tikzstyle{mass}=[line width=0.6,red!30!black,fill=red!40!black!10,rounded corners=1,
top color=red!40!black!20,bottom color=red!40!black!10,shading angle=20]
\tikzstyle{rope}=[brown!30!black,fill=brown!70!black,line width=0.4]
\tikzstyle{limb}=[thick,line cap=round]
\tikzset{
pics/Tin/.style={
code={
\def\R{0.12}
\draw[pic actions,line width=0.6,#1,fill=white] % ,thick
(0,0) circle (\R) (-135:.75*\R) -- (45:.75*\R) (-45:.75*\R) -- (135:.75*\R);
}},
pics/Tout/.style={
code={
\def\R{0.12}
\draw[pic actions,line width=0.6,#1,fill=white] (0,0) circle (\R);
\fill[pic actions,#1] (0,0) circle (0.3*\R);
}},
pics/Tin/.default=mypurple,
pics/Tout/.default=mypurple,
}
\begin{document}
% TIGHT ROPE arms
\def\L{3.2} % length
\def\T{0.08} % plank thickness
\def\H{2.2} % human height
\def\CM{0.06} % CM radius
\begin{tikzpicture}
\coordinate (O) at (0,0);
\draw[rope] (O) circle (0.08);
\draw[thick] (0,\H) circle(0.3) coordinate (H);
\draw[thick] (H)++(-90:0.3) coordinate (N) to[out=-92,in=92]++ (0,-0.40*\H) coordinate (P);
\draw[limb] (N)++(-120:0.03) to[out=-120,in=30]++ (-0.27*\H,-0.3*\H); % right arm
\draw[limb] (N)++(-60:0.03) to[out=-60,in=140]++ (0.27*\H,-0.3*\H); % left arm
\draw[limb] (P) to[out=-95,in=95] (96:0.1); % right leg
\draw[limb] (P) to[out=-85,in=88] (84:0.1); % left leg
\draw[CM] (0,0.54*\H) circle(\CM) node[below right=0,scale=0.8] {CM};
\end{tikzpicture}
% TIGHT ROPE - stick
\begin{tikzpicture}
\coordinate (O) at (0,0);
\draw[rope] (O) circle (0.08);
\draw[thick] (0,\H) circle(0.3) coordinate (H);
\draw[thick] (H)++(-90:0.3) coordinate (N) to[out=-91,in=92]++ (0,-0.40*\H) coordinate (P);
\draw[limb] (P) to[out=-95,in=95] (96:0.1); % left leg
\draw[limb] (P) to[out=-85,in=88] (84:0.1); % right leg
\draw[myred,line width=1.5,line cap=round]
(-\H,0.1*\H) to[out=40,in=180] (0,0.47*\H) to[out=0,in=140] (\H,0.1*\H);
\draw[limb] (N)++(-95:0.03) to[out=-120,in=80]++ (-0.19*\H,-0.4*\H); % right arm
\draw[limb] (N)++(-85:0.03) to[out=-60,in=100]++ (0.19*\H,-0.4*\H); % left arm
\draw[CM] (0,0.4*\H) circle(\CM) node[below right=0,scale=0.8] {CM};
\end{tikzpicture}
% TIGHT ROPE - weights
\begin{tikzpicture}
\def\L{1.2} % handle length
\def\w{0.3} % mass width
\def\h{0.45} % mass height
\def\r{0.02} % rope radius
\coordinate (O) at (0,0);
\coordinate (SL) at (-\L/2,0.42*\H); % stick left
\coordinate (SR) at ( \L/2,0.42*\H); % stick right
\coordinate (ML) at (-\L/2,-0.2*\H); % mass left
\coordinate (MR) at ( \L/2,-0.2*\H); % mass right
\draw[rope] (O) circle (0.08);
\draw[thick] (0,\H) circle(0.3) coordinate (H);
\draw[thick] (H)++(-90:0.3) coordinate (N) to[out=-91,in=92]++ (0,-0.40*\H) coordinate (P);
\draw[limb] (P) to[out=-95,in=95] (96:0.1); % left leg
\draw[limb] (P) to[out=-85,in=88] (84:0.1); % right leg
\draw[myred,line width=1.5,line cap=round] (SL)++(-0.05,0) -- (SR) --++ (0.05,0);
\draw[limb] (N)++(-95:0.03) to[out=-120,in=85]++ (-0.14*\H,-0.44*\H); % right arm
\draw[limb] (N)++(-85:0.03) to[out=-60,in=95]++ (0.14*\H,-0.44*\H); % left arm
\draw[CM] (0,-0.15*\H) circle(\CM) node[below=2,scale=0.8] {CM};
\draw[rope] (SL)++(-\r,0.02) arc(180:0:\r) -- ($(ML)+(\r,0)$) --++ (-2*\r,0) -- cycle;
\draw[rope] (SR)++(-\r,0.02) arc(180:0:\r) -- ($(MR)+(\r,0)$) --++ (-2*\r,0) -- cycle;
\draw[mass] (ML)++(-\w/2,-\h) rectangle++ (\w,\h);
\draw[mass] (MR)++(-\w/2,-\h) rectangle++ (\w,\h);
\end{tikzpicture}
% TIGHT ROPE - weights - forces
\begin{tikzpicture}
\def\R{1.5}
\def\F{0.65*\R}
\def\ang{30}
\coordinate (O) at (0,0);
\coordinate (B) at (0,{-1.2*\R*cos(\ang)});
\coordinate (CM) at (-90+\ang:\R);
\coordinate (T) at ($(CM)+(60:0.3*\R)$);
\draw[dashed] (O) -- (B);
\draw[rope] (O) circle (0.14);
\draw[CM] (CM) circle(0.12) node[below=2,right=2,scale=0.8] {CM};
\draw[force] (O) --++ (0,\F) node[right=1] {$\vb{F}_\mathrm{N}$};
\draw[force] (CM) --++ (0,-\F) node[right=1] {$m\vb{g}$};
\pic[scale=1] at (T) {Tin};
\node[mypurple,above right=0] at (T) {$\vb*\tau$};
\draw[rvec] (O) -- (CM) node[midway,above right=-2] {$\vb{r}$};
\draw pic[->,"$\theta$",draw,angle radius=21,angle eccentricity=1.3] {angle=B--O--CM};
\end{tikzpicture}
\end{document}Click to download: dynamics_stability_tightrope.tex • dynamics_stability_tightrope.pdf
Open in Overleaf: dynamics_stability_tightrope.tex


")
