")


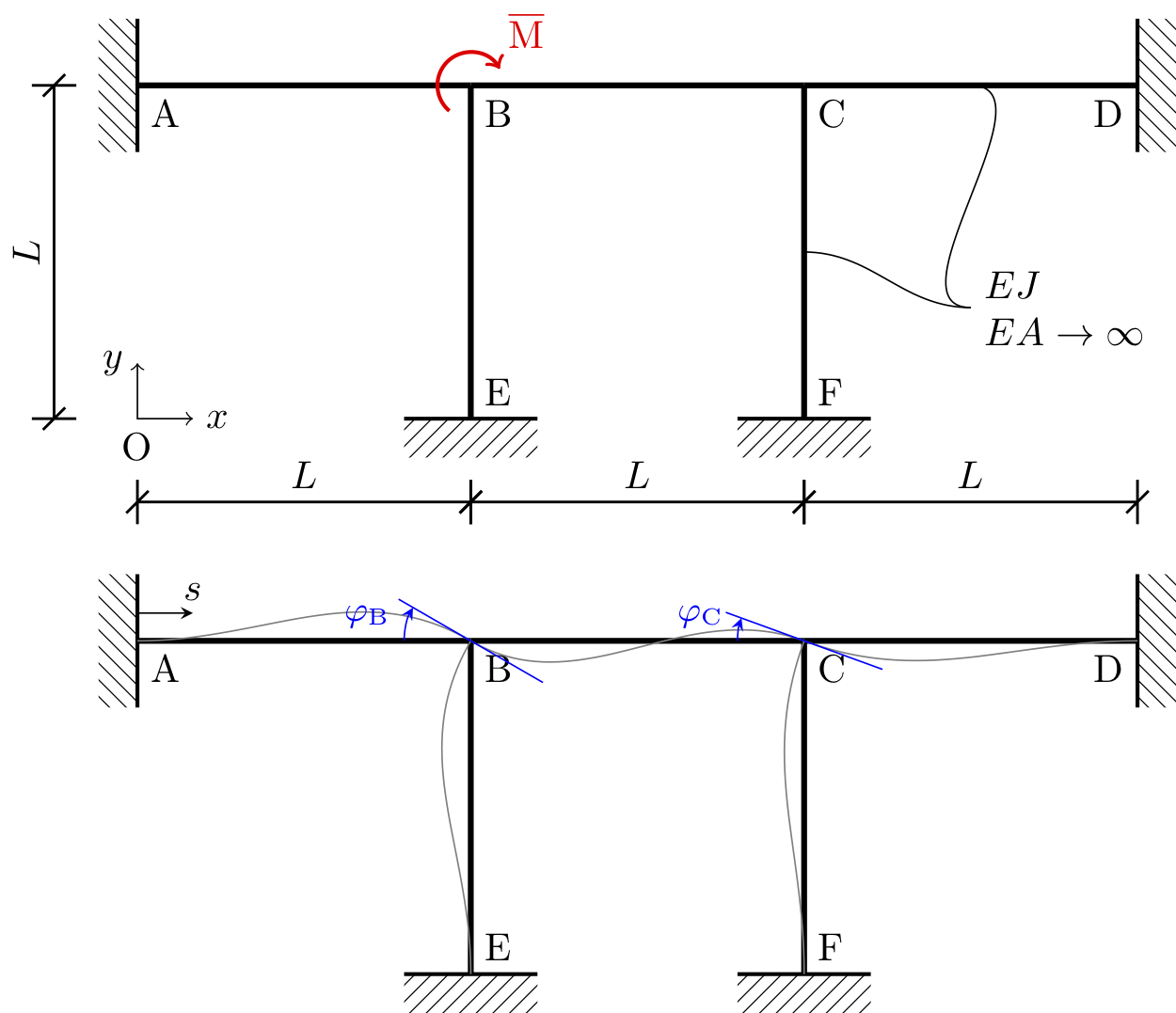
A frame structure made by inextensible beams and columns. There are three particularities:
- the frame is defined and used twice;
- scoping technique;
- a qualitative deformation made by spline.
\documentclass[tikz]{standalone}
\usepackage{pgfplots}
\pgfplotsset{/pgf/number format/use comma,compat=1.18}
\usepackage[T1]{fontenc}
\usepackage[utf8]{inputenc}
\usepackage{stanli} % TikZ Library for Structural Analysis by Jurgen Hackl
\usetikzlibrary{calc,intersections,patterns}
% frame definition, to be reused
\tikzset{ frame/.pic = {
%points
\point{A}{0}{3};
\point{B}{3}{3};
\point{C}{6}{3};
\point{D}{9}{3};
\point{E}{3}{0};
\point{F}{6}{0};
%beams
\beam{2}{A}{B}[0][0];
\beam{2}{B}{C}[0][0];
\beam{2}{C}{D}[0][0];
\beam{2}{E}{B}[0][0];
\beam{2}{F}{C}[0][0];
%supports
\support{3}{A}[-90];
\support{3}{D}[90];
\support{3}{E}[0];
\support{3}{F}[0];
%node labels
\notation{1}{A}{A}[below right];
\notation{1}{B}{B}[below right];
\notation{1}{C}{C}[below right];
\notation{1}{D}{D}[below left];
\notation{1}{E}{E}[above right];
\notation{1}{F}{F}[above right];
}
}
\begin{document}
\begin{tikzpicture}[scale=1]
%\draw [help lines] (0,0) grid [step=1] (9,3);
% Coordinates system
\draw(0,0)node[below]{O};
\draw[<->] (0.5,0) node[right]{$x$}-|(0,0.5) node[left]{$y$};
% the frame
\pic at (0,0) {frame};
% load force
\begin{scope}[color=red]
\load{2}{B}[30][200][0.3];
\notation{1}{3.5,3.5}{$\overline{\mathrm{M}}$}[centered];
\end{scope}
% dimensions
\dimensioning{2}{0,0}{A}{-0.75}[$L$];
\dimensioning{1}{0,0}{E}{-0.75}[$L$];
\dimensioning{1}{E}{F}{-0.75}[$L$];
\dimensioning{1}{F}{9,0}{-0.75}[$L$];
% other labels
\draw(7.5,1)node[right,align=left]{$EJ$\\$EA\to\infty$} to [out=180,in=0] (6,1.5);
\draw(7.5,1)node[right]{} to [out=180,in=0] (7.5,3);
\begin{scope}[yshift=-5cm]
% the frame
\pic at (0,0) {frame};
% deformation
\draw [gray](A)to[out=0,in=150](B)to[out=-30,in=160](C)to[out=-20,in=180](D);
\draw [gray](E)to[out=90,in=240](B);
\draw [gray](F)to[out=90,in=250](C);
% node rotations
\draw [blue,rotate=-30]($(B)+(-0.75,0)$) -- ($(B)+(0.75,0)$);
\draw [-stealth,blue](B) ++(180:6mm) node [above left] {\small$\varphi_\mathrm{B}$} arc (180:150:6mm);
\draw [blue,rotate=-20]($(C)+(-0.75,0)$) -- ($(C)+(0.75,0)$);
\draw [-stealth,blue](C) ++(180:6mm) node [above left] {\small$\varphi_\mathrm{C}$} arc (180:160:6mm);
% local reference system
\draw [|-stealth] (0,3.25) -- +(0.5,0) node [above] {$s$};
\end{scope}
\end{tikzpicture}
\end{document}