")


For more figures related to the definition of coordinate systems, please have a look at the “coordinates” tag.
Edit and compile if you like:
% Author: Izaak Neutelings (September 2020)
\documentclass[border=3pt,tikz]{standalone}
\usepackage{amsmath}
\usepackage{tikz}
\usepackage{physics}
\usetikzlibrary{intersections}
\usetikzlibrary{decorations.markings}
\usetikzlibrary{angles,quotes} % for pic
\usetikzlibrary{decorations.pathmorphing} % for decorate random steps
\tikzset{>=latex} % for LaTeX arrow head
\usepackage{xcolor}
\colorlet{xcol}{blue!70!black}
\colorlet{xcol'}{xcol!50!red!80!black}
\colorlet{veccol}{green!45!black}
\tikzstyle{vector}=[->,thick,veccol,line cap=round]
\tikzstyle{rvec}=[->,thick,xcol,line cap=round]
\begin{document}
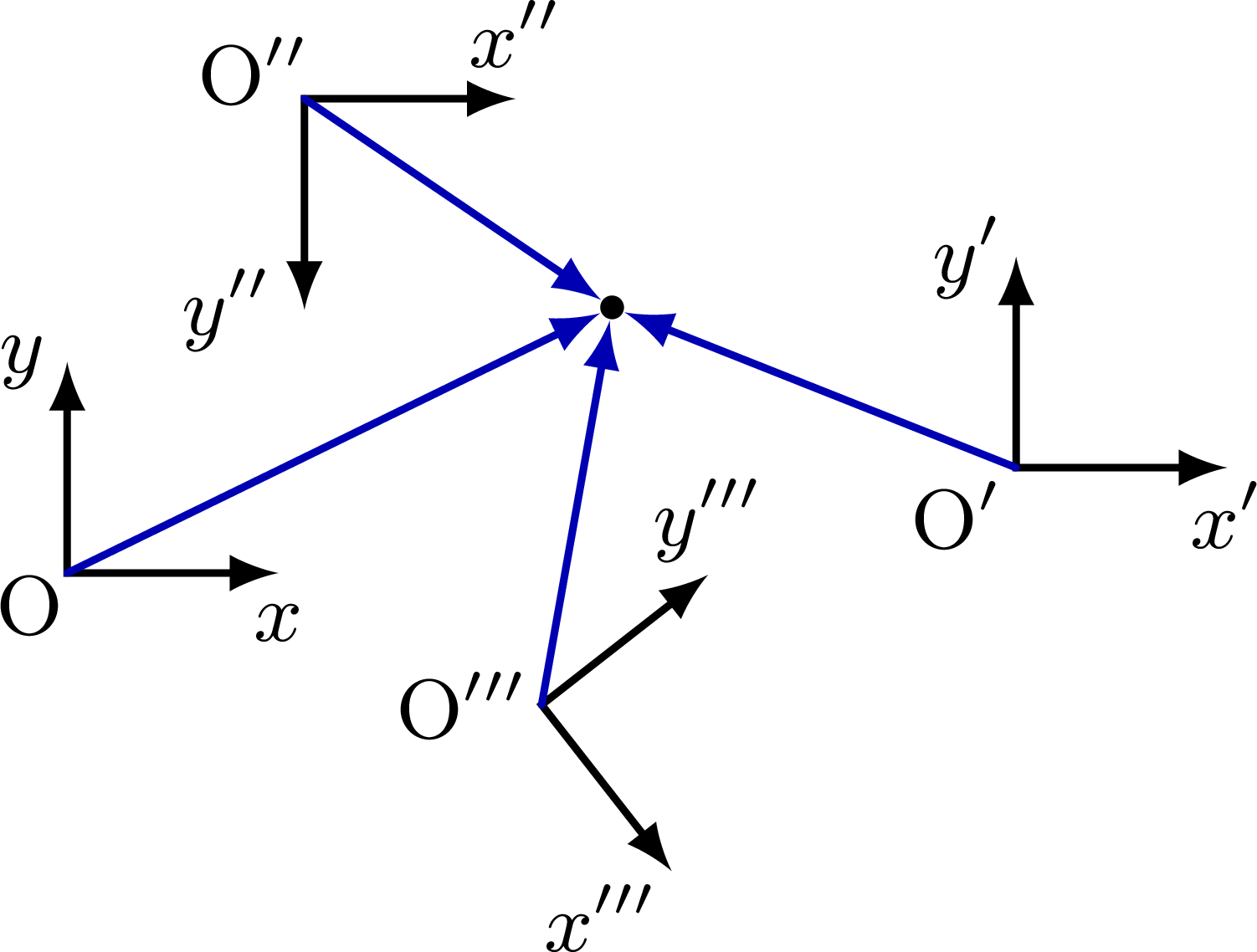
% VECTOR breakdown on axis
\begin{tikzpicture}
\small
\def\L{0.8}
\def\R{2.3}
\def\ang{26}
\def\thet{-52}
\coordinate (O) at (0,0);
\coordinate (O1) at (3.6,0.4);
\coordinate (O2) at (0.9,1.8);
\coordinate (O3) at (1.8,-0.5);
\coordinate (R) at (\ang:\R);
\node[fill=black,circle,inner sep=0.9] (R') at (R) {};
% O1
\draw[<->,thick] (\L,0) node[below] {$x$} --
(O) node[below left=-3] {O} --
(0,\L) node[left=-1] {$y$};
\draw[rvec] (O) -- (R');
% O1
\begin{scope}[shift={(O1)}]
\draw[<->,thick] (\L,0) node[below=-2] {$x'$} --
(0,0) node[below left=-2] {O$'$} --
(0,\L) node[left=-2] {$y'$};
\draw[rvec] (0,0) -- (R');
\end{scope}
% O2
\begin{scope}[shift={(O2)}]
\draw[<->,thick] (\L,0) node[above] {$x''$} --
(0,0) node[above left=-4] {O$''$} --
(0,-\L) node[left] {$y''$};
\draw[rvec] (0,0) -- (R');
\end{scope}
% O3
\begin{scope}[shift={(O3)}]
\draw[<->,thick] (\thet:\L) node[below left=-2] {$x'''$} --
(0,0) node[left=-2] {O$'''$} --
(\thet+90:\L) node[above=-2] {$y'''$};
\draw[rvec] (0,0) -- (R');
\end{scope}
\end{tikzpicture}
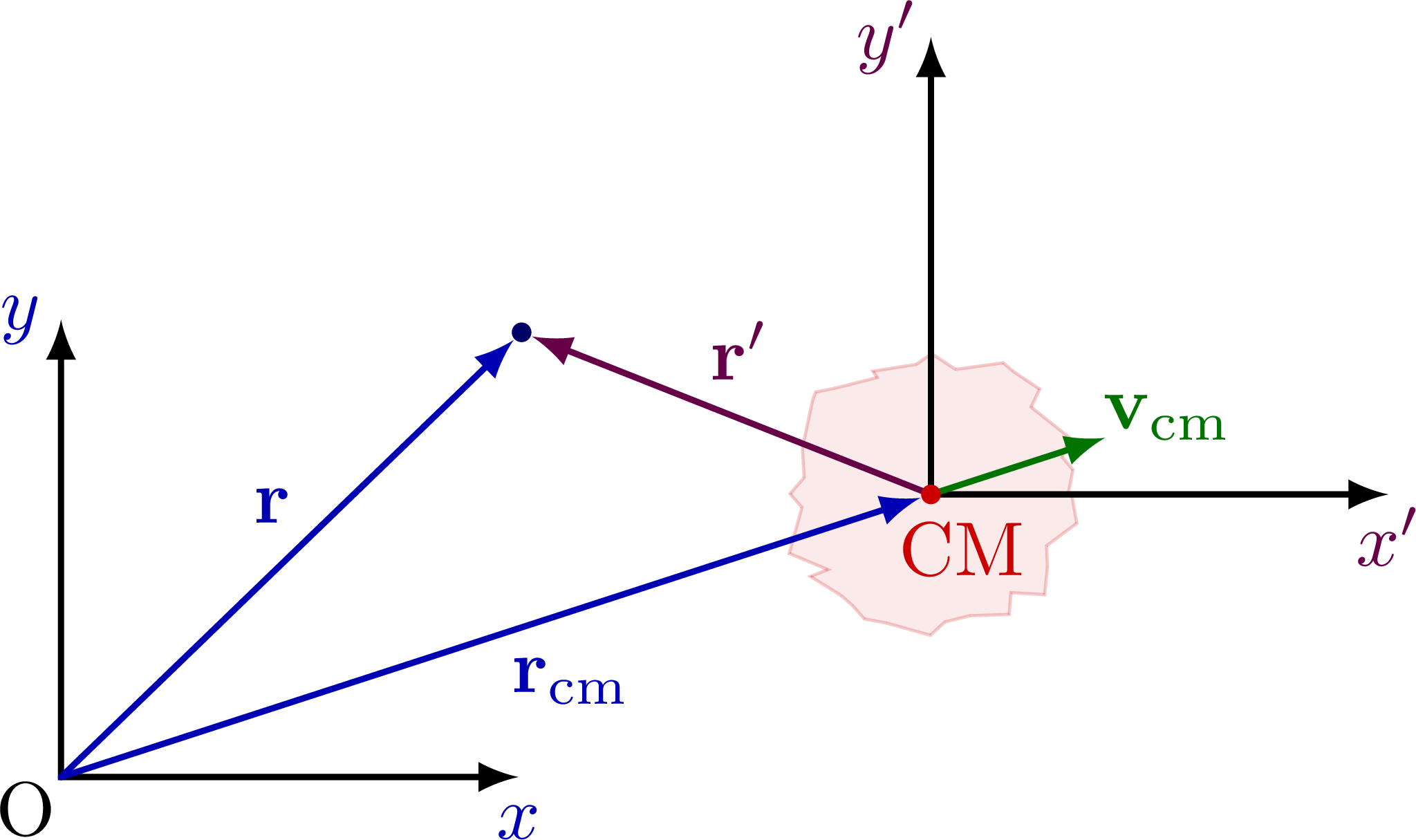
% LAB & COM FRAMES
\begin{tikzpicture}
\def\L{2.1}
\def\ang{18} % angle of the CM velocity
\coordinate (O) at (0,0);
\coordinate (O') at (\ang:2.0*\L);
\coordinate (R) at (44:1.4*\L);
\node[fill=blue!40!black,circle,inner sep=0.9] (R') at (R) {};
% LAB
\draw[<->,thick] (\L,0) node[below,xcol] {$x$} --
(O) node[below left=-3] {O} --
(0,\L) node[left=-1,xcol] {$y$};
\draw[rvec] (O) -- (R') node[midway,left=2,above=1] {$\vb{r}$}; %$(\vb{r})_\mathrm{lab}$
% COM
\draw[red!80!black,fill=red!80!black!40,opacity=0.2,
decorate,decoration={random steps,segment length=3pt,amplitude=2pt}]
(O') circle(0.3*\L);
\draw[<->,thick] (O')++(\L,0) node[below=-2,xcol'] {$x'$} --++
(-\L,0) node[red!80!black,right=4,below] {CM} --++
(0,\L) node[left=-2,xcol'] {$y'$};
\draw[rvec,xcol'] (O') -- (R') node[midway,right=1,above=1] {$\vb{r}'$}; %(\vb{r})_\mathrm{cm}
\draw[vector] (O') --++ (\ang:0.4*\L) node[above right=-4] {$\vb{v}_\mathrm{cm}$}; %(\vb{v}_\mathrm{cm})_\mathrm{lab}
\node[fill=red!80!black,circle,inner sep=0.9] (CM) at (O') {};
\draw[rvec] (O) -- (CM) node[midway,below right=-1] {$\vb{r}_\mathrm{cm}$}; %(\vb{r}_\mathrm{cm})_\mathrm{lab}
\end{tikzpicture}
\end{document}Click to download: reference_frame.tex • reference_frame.pdf
Open in Overleaf: reference_frame.tex




