")


The pseudo force (or fictitious force) due to the acceleration of a non-inertial frame of reference S'.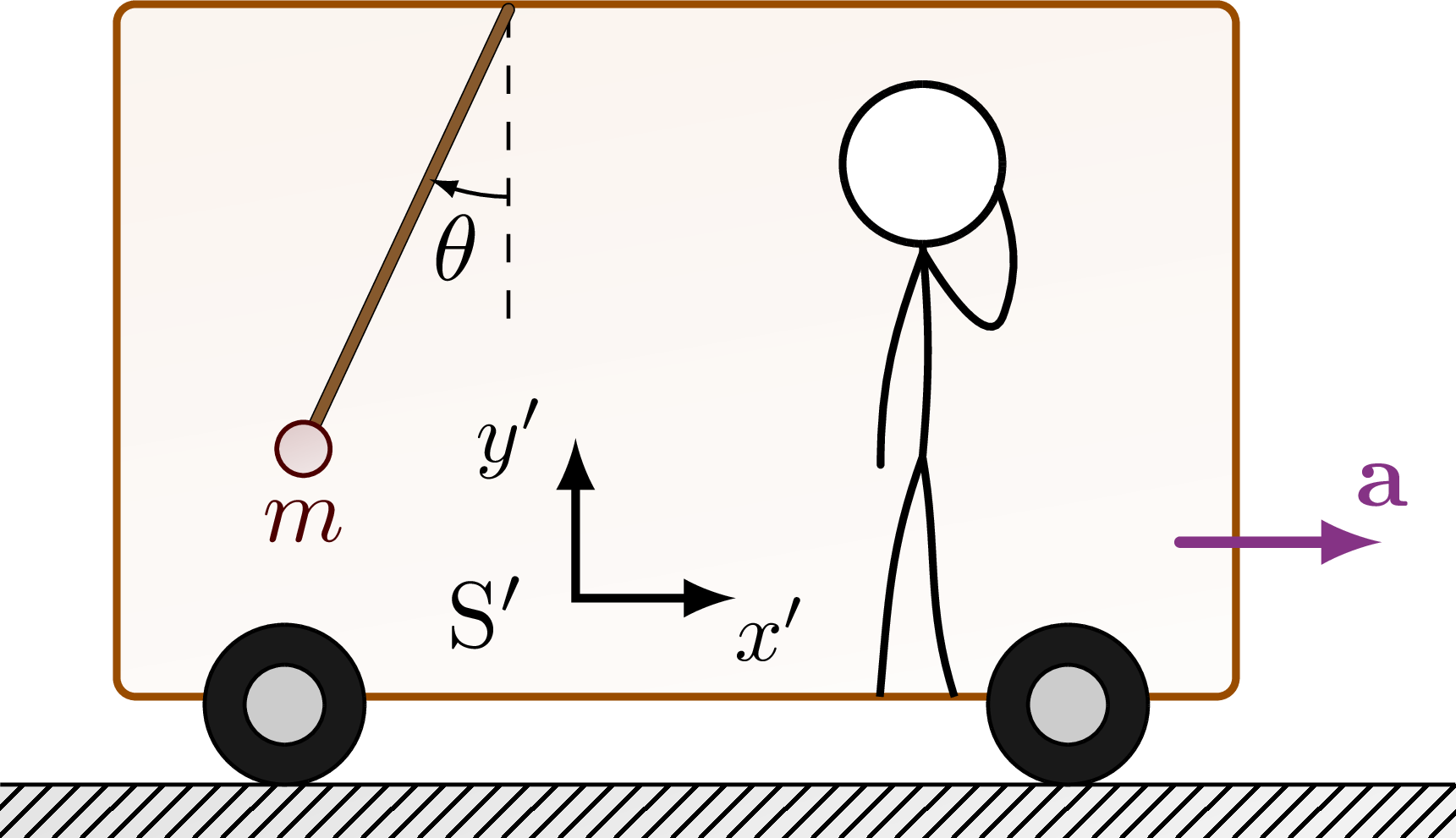 Force diagram of the mass in inertial 'lab' frame S:
Force diagram of the mass in inertial 'lab' frame S: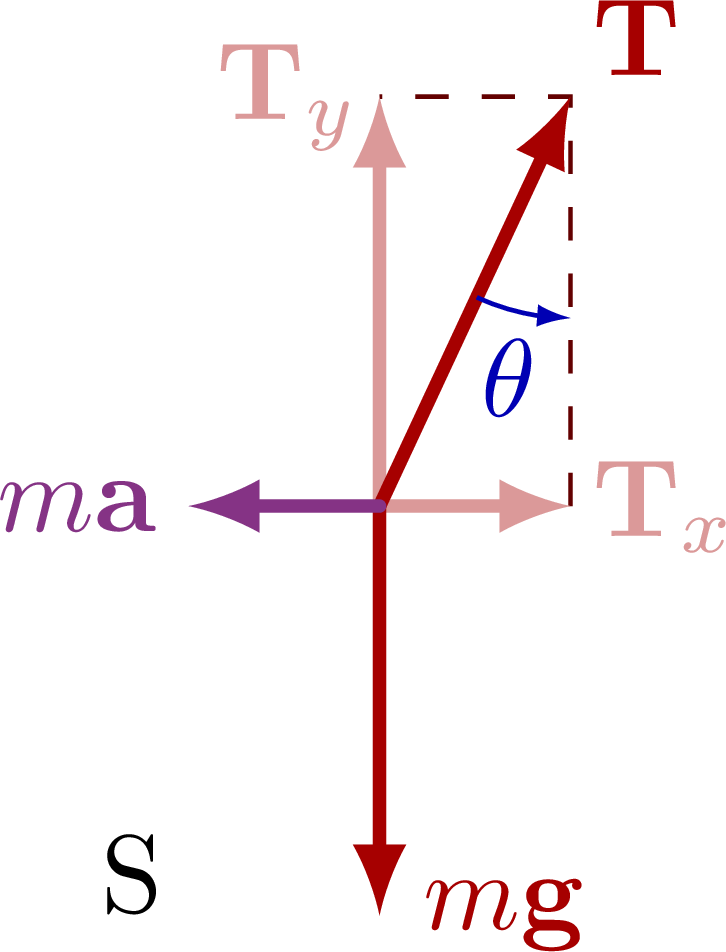 Force diagram in the non-inertial frame S' with the pseudo force F'.
Force diagram in the non-inertial frame S' with the pseudo force F'.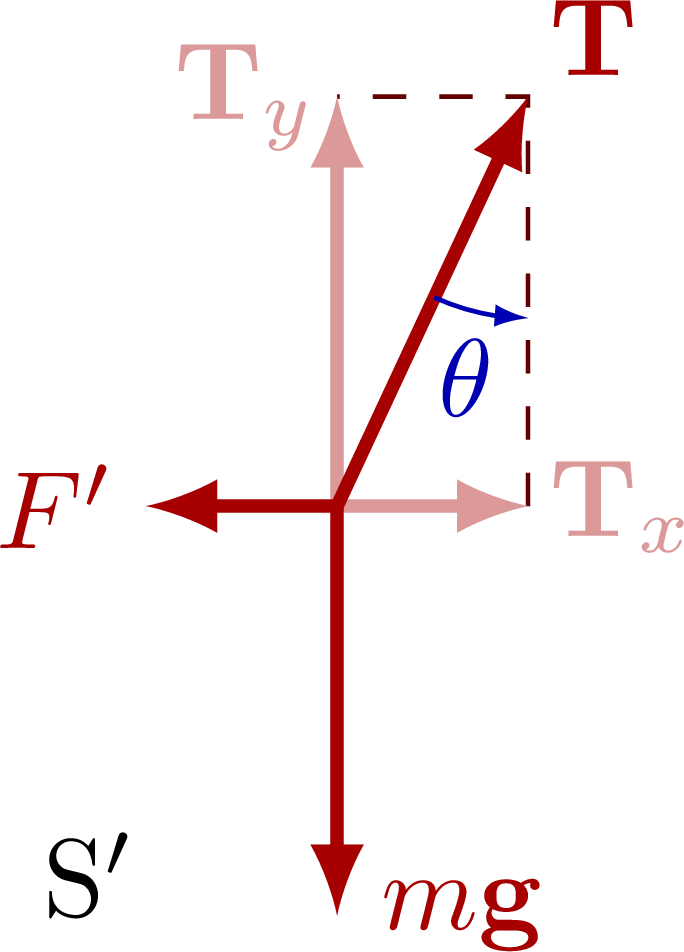
Edit and compile if you like:
% Author: Izaak Neutelings (September 2020)
\documentclass[border=3pt,tikz]{standalone}
\usepackage{amsmath}
\usepackage{tikz}
\usepackage{physics}
\usetikzlibrary{calc}
\usetikzlibrary{angles,quotes} % for pic
\usetikzlibrary{arrows.meta} % for arrow size
\usetikzlibrary{bending} % for arrow head angle
\usetikzlibrary{patterns}
\tikzset{>=latex} % for LaTeX arrow head
\usepackage{xcolor}
\colorlet{xcol}{blue!70!black}
\colorlet{vcol}{green!45!black}
\colorlet{acol}{red!50!blue!80!black!80}
\tikzstyle{vvec}=[->,very thick,vcol,line cap=round]
\tikzstyle{avec}=[->,very thick,acol,line cap=round]
\colorlet{myred}{red!65!black}
\tikzstyle{force}=[->,myred,very thick,line cap=round]
\tikzstyle{Fproj}=[force,myred!40]
\tikzstyle{ground}=[preaction={fill,top color=black!10,bottom color=black!5,shading angle=20},
fill,pattern=north east lines,draw=none,minimum width=0.3,minimum height=0.6]
\tikzstyle{mass}=[line width=0.5,red!30!black,fill=red!40!black!10,rounded corners=1,
top color=red!40!black!20,bottom color=red!40!black!10,shading angle=20]
\tikzstyle{rope}=[brown!70!black,line width=1,line cap=round] %very thick
\tikzstyle{myarr}=[-{Latex[length=3,width=2]},thin]
\def\rope#1{ \draw[rope,black,line width=1.4] #1; \draw[rope,line width=1.1] #1; }
\def\car{
\draw[thick,rounded corners=2,orange!60!black,
top color=orange!70!black!6,bottom color=orange!70!black!2,shading angle=10]
(0,1.1*\CR) rectangle++ (\CW,\CH);
\fill[black!20]
(0.15*\CW,\CR) circle(\CR) (0.85*\CW,\CR) circle(\CR);
\draw[black,fill=black!90,thin,even odd rule]
(0.15*\CW,\CR) circle(\CR) circle(0.5*\CR)
(0.85*\CW,\CR) circle(\CR) circle(0.5*\CR);
}
\begin{document}
% MOVING REFERENCE FRAME
\def\ang{-115} % rope angle
\begin{tikzpicture}
\def\r{0.10} % mass radius
\def\H{2.0} % human height
\def\CW{4.2} % car width
\def\CH{2.6} % car height
\def\CR{0.3} % wheel radius
\def\W{1.30*\CW} % ground width
\def\D{0.2} % ground depth
\def\L{0.7*\CH} % rope length
\coordinate (T) at (0.35*\CW,\CH+\CR+0.01);
% SETUP
\draw[ground] (-0.08*\W,0) rectangle++ (\W,-\D);
\draw (-0.08*\W,0) --++ (\W,0);
% CAR 1
\car
\draw[thick,fill=white] (0.72*\CW,\H+\CR+0.03) circle (0.15*\H) coordinate (H);
\draw[thick] (H)++(-90:0.15*\H) coordinate (N) to[out=-85,in=85]++ (0,-0.40*\H) coordinate (P);
\draw[thick,line cap=round] (N)++(-85:0.03) to[out=-110,in=90]++ (-0.08*\H,-0.4*\H);
\draw[thick,line cap=round] (N)++(-85:0.03) to[out=-60,in=-110]++ (0.15*\H,-0.12*\H) to[out=70,in=-70]++ (-0.01*\H,0.24*\H);
\draw[thick] (P) to[out=-110,in=85] ($(H)+(-0.08*\H,-\H)$);
\draw[thick] (P) to[out=-80,in=108] ($(H)+(0.06*\H,-\H)$);
\draw[avec] (0.95*\CW,0.35*\CH) --++ (0.18*\CW,0) node[above] {$\vb{a}$};
% MASS
\draw[dashed] (T) --++ (0,-0.65*\L) coordinate (B);
\rope {(T) --++ (\ang:\L) coordinate (M)};
\draw pic[{Latex[length=3,width=2,flex'=1]}-,"$\theta$",draw,angle radius=20,angle eccentricity=1.3] {angle=M--T--B};
\draw[mass] (M) circle(\r) node[below=2] {$m$};
% AXIS
\node (A) at (0.33*\CW,0.25*\CH) {S$'$};
\draw[<->,line width=0.9]
(A)++(0.08*\CW,0.25*\CH) node[left,scale=0.9] {$y'$} |-++
(0.3*\H,-0.30*\H) node[below right=-3.5,scale=0.9] {$x'$};
\end{tikzpicture}
% PENDULUM FORCES
\begin{tikzpicture}
\def\FG{1.3} % weight force (mg) magnitude
\coordinate (O) at (0,0);
\coordinate (FT) at (180+\ang:{\FG/cos(90+\ang)});
\coordinate (FTx) at ({\FG*tan(90-\ang)},0);
\coordinate (FTy) at (0,\FG);
\coordinate (FG) at (-90:\FG);
\coordinate (FGx) at (-90+\ang:{0.7*\FG});
\coordinate (MA) at ({\FG*tan(\ang-90)},0);
\draw[dashed,myred!60!black] (FTx) -- (FT) -- (FTy);
\draw[Fproj] (O) -- (FTy) node[left=-2] {$\vb{T}_y$};
\draw[Fproj] (O) -- (FTx) node[right=-2] {$\vb{T}_x$};
\draw[force] (O) -- (FT) node[above right=-2] {$\vb{T}$};
\draw[force] (O) -- (FG) node[right=0] {$m\vb{g}$};
\draw[avec] (O) -- (MA) node[left=-1] {$m\vb{a}$};
\draw pic[myarr,"$\theta$",xcol,draw=xcol,angle radius=20,angle eccentricity=1.3] {angle=O--FT--FTx};
\node at ({1.3*\FG*tan(\ang-90)},-0.9*\FG) {S};
\end{tikzpicture}
% PENDULUM FORCES
\begin{tikzpicture}
\def\FG{1.3} % weight force (mg) magnitude
\coordinate (O) at (0,0);
\coordinate (FT) at (180+\ang:{\FG/cos(90+\ang)});
\coordinate (FTx) at ({\FG*tan(90-\ang)},0);
\coordinate (FTy) at (0,\FG);
\coordinate (FG) at (-90:\FG);
\coordinate (FGx) at (-90+\ang:{0.7*\FG});
\coordinate (MA) at ({\FG*tan(\ang-90)},0);
\draw[dashed,myred!60!black] (FTx) -- (FT) -- (FTy);
\draw[Fproj] (O) -- (FTy) node[left=-2] {$\vb{T}_y$};
\draw[Fproj] (O) -- (FTx) node[right=-2] {$\vb{T}_x$};
\draw[force] (O) -- (FT) node[above right=-2] {$\vb{T}$};
\draw[force] (O) -- (FG) node[right=0] {$m\vb{g}$};
\draw[force] (O) -- (MA) node[left=-1] {$F'$};
\draw pic[myarr,"$\theta$",xcol,draw=xcol,angle radius=20,angle eccentricity=1.3] {angle=O--FT--FTx};
\node at ({1.3*\FG*tan(\ang-90)},-0.9*\FG) {S$'$};
\end{tikzpicture}
\end{document}Click to download: reference_frame_noninertial.tex • reference_frame_noninertial.pdf
Open in Overleaf: reference_frame_noninertial.tex





