")


Phase portrait of the differential equation for a simple harmonic oscillator and a pendulum. Also see these plots of the solutions, or the Taylor approximations.
These figures are used in Ben Kilminster’s lecture notes for PHY111.
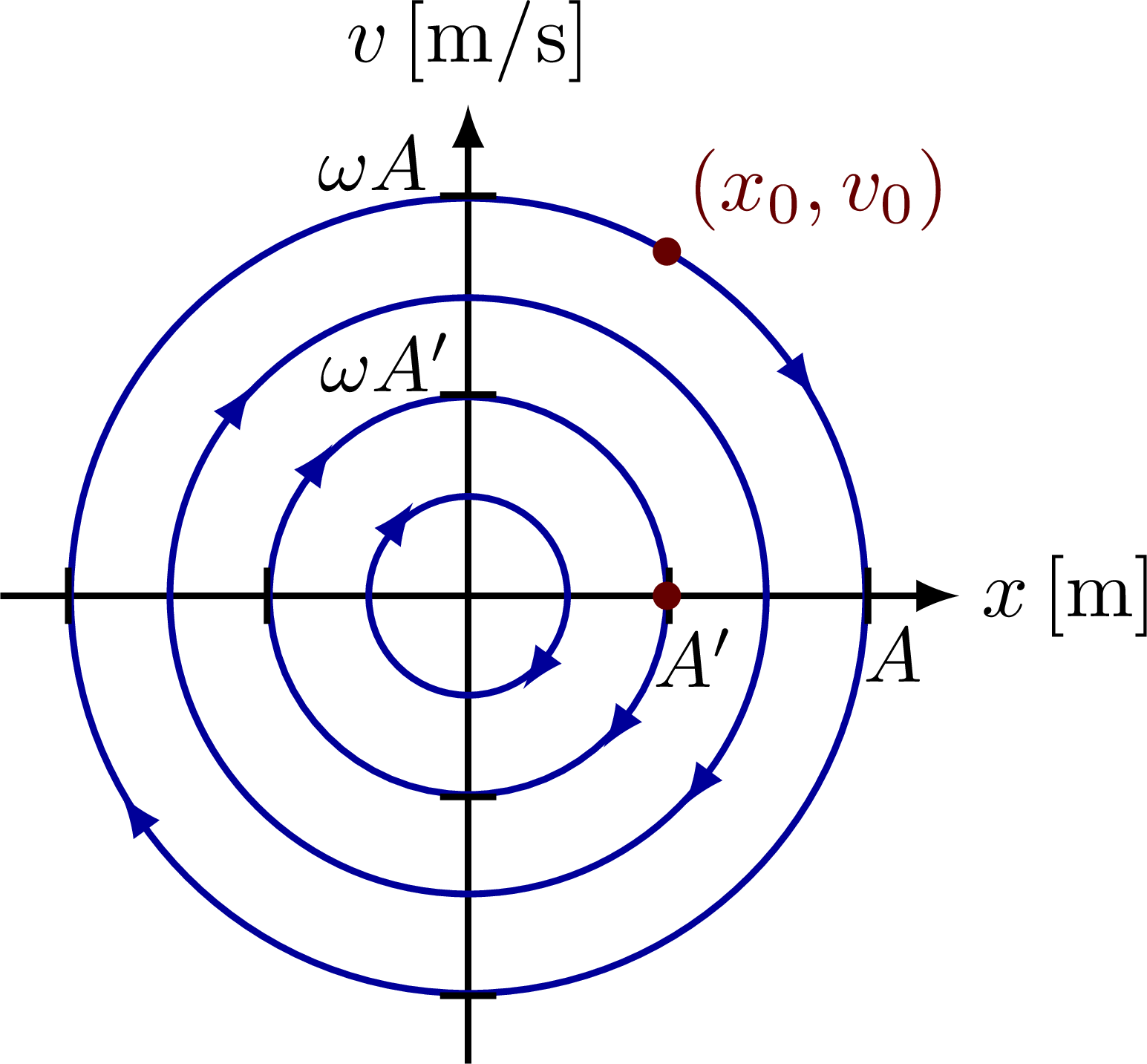
Phase portrait of a simple harmonic oscillator with a given initial condition (dark red point):
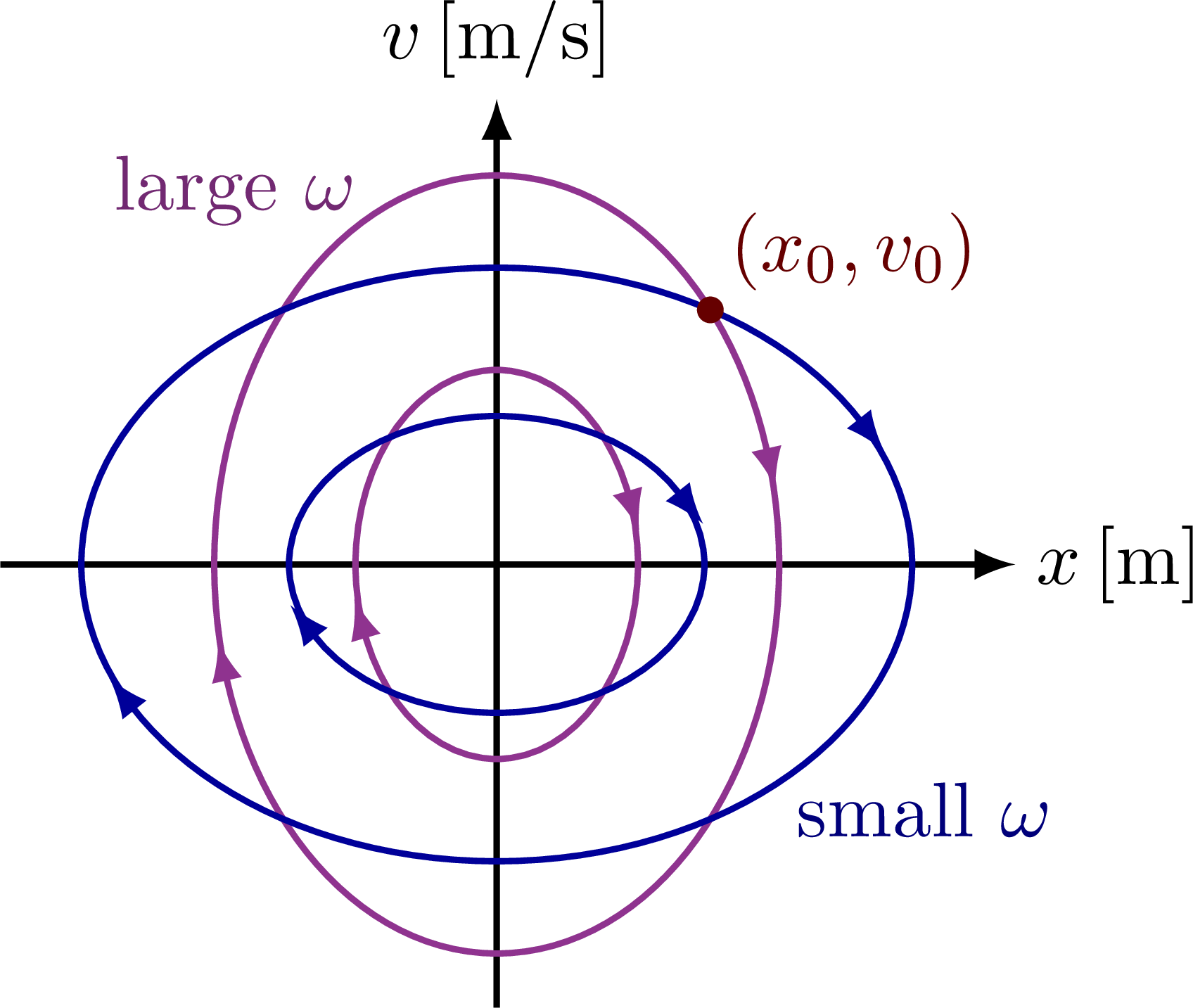
Phase portrait of two simple harmonic oscillators with different period, has a different shape:
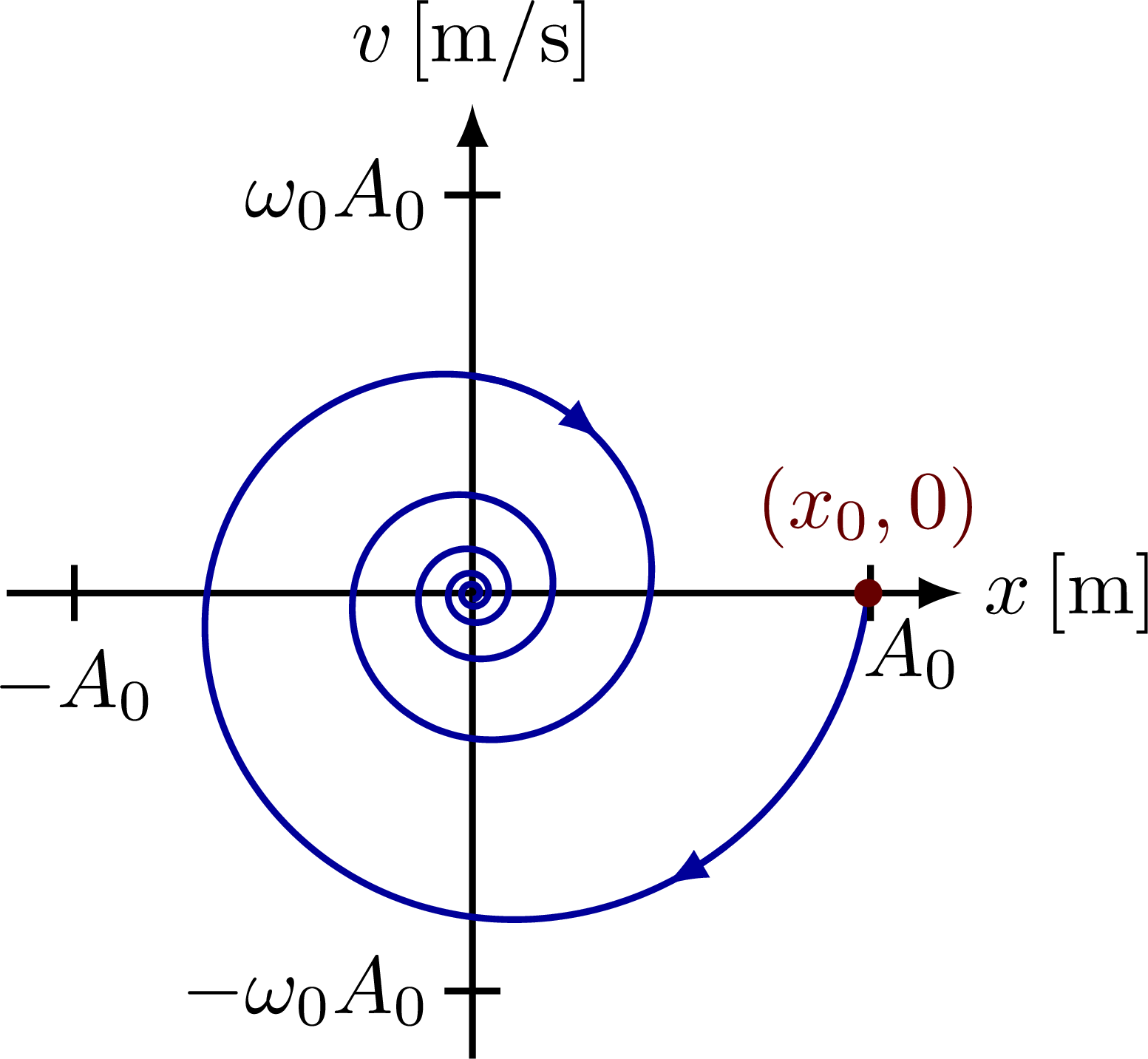
Phase portrait of a damped harmonic oscillator spiraling to the center, which is an attractor:
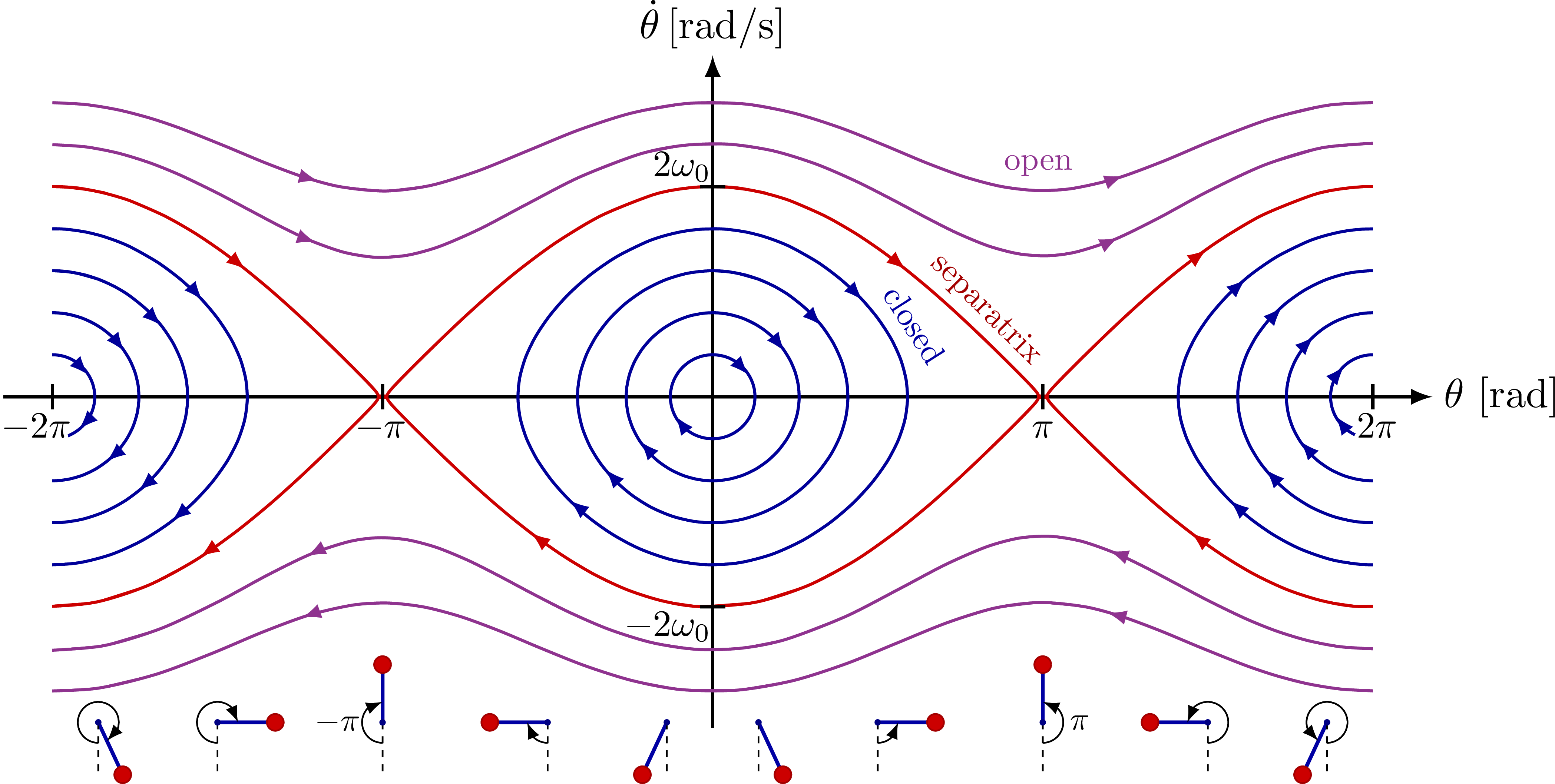
Phase portrait of a pendulum with closed and open paths, separated by a separatrix. These curves were made numerically by these MATLAB scripts, and need to be loaded via these text files to compile this part of the code. A full working setup with input files is also available from this zip file.
For more pendulum related figures, please see the “pendulum” tag.
Edit and compile if you like:
% Author: Izaak Neutelings (February 2021)
% https://mathworld.wolfram.com/PhasePortrait.html
\documentclass[border=3pt,tikz]{standalone}
\usepackage{amsmath} % for \dfrac
\usepackage{physics,siunitx}
\usepackage{tikz,pgfplots}
\usepackage{etoolbox} % ifthen
\usepackage[outline]{contour} % glow around text
\contourlength{1.1pt}
\usetikzlibrary{angles,quotes} % for pic (angle labels)
\usetikzlibrary{arrows.meta}
\usetikzlibrary{calc}
\usetikzlibrary{decorations.markings}
\usetikzlibrary{bending} % for arrow head angle
\tikzset{>=latex} % for LaTeX arrow head
\usepackage{xcolor}
\pgfplotsset{compat=newest}
\colorlet{xcol}{blue!60!black}
\colorlet{myred}{red!80!black}
\colorlet{myblue}{blue!80!black}
\colorlet{mygreen}{green!40!black}
\colorlet{mypurple}{red!50!blue!90!black!80}
\colorlet{mydarkred}{myred!80!black}
\colorlet{mydarkblue}{myblue!80!black}
\tikzstyle{xline}=[xcol,thick,smooth]
\tikzstyle{width}=[{Latex[length=5,width=3]}-{Latex[length=5,width=3]},thick]
\tikzstyle{mydashed}=[dash pattern=on 1.7pt off 1.7pt]
\tikzset{
traj/.style 2 args={xline,postaction={decorate},decoration={markings,
mark=at position #1 with {\arrow{<}},
mark=at position #2 with {\arrow{<}}}
}
}
\def\tick#1#2{\draw[thick] (#1)++(#2:0.12) --++ (#2-180:0.24)}
\def\N{100} % number of samples
\begin{document}
% PHASE DIAGRAM: Simple harmonic oscillator
\begin{tikzpicture}
\message{^^JPHASE DIAGRAM: Simple harmonic oscillator}
\def\xmax{2.0}
\def\A{1.7}
\def\a{0.85}
\def\ang{60}
\coordinate (O) at (0,0);
\coordinate (X) at (\A,0);
\coordinate (R) at (\ang:\A);
\coordinate (R') at (0:\a);
\draw[->,thick] (-\xmax,0) -- (\xmax+0.1,0) node[right=-1] {$x$\,[m]};
\draw[->,thick] (0,-\xmax) -- (0,\xmax+0.1) node[above=-1] {$v$\,[m/s]};
\draw[traj={0.10}{0.60}] (0,0) circle(\A); % (\ang:\A) arc(\ang:\ang-360:\A);
\draw[traj={0.40}{0.90}] (0,0) circle(\a);
\draw[traj={0.40}{0.90}] (0,0) circle(0.75*\A);
\draw[traj={0.40}{0.90}] (0,0) circle(0.25*\A);
\tick{0,-\A-0.01}{0}; %node[left=-1,scale=1] {$A$};
\tick{0, \A+0.01}{0} node[above=4,left=-2,scale=0.95] {$\omega A$};
\tick{0,-\a-0.01}{0};
\tick{0, \a+0.01}{0} node[above=4,left=-5,scale=0.95] {$\omega A'$};
\tick{-\A-0.01,0}{90};
\tick{-\a-0.01,0}{90};
\tick{ \A+0.01,0}{90} node[right=3,below=-3,scale=0.95] {$A$};
\tick{ \a+0.01,0}{90} node[right=3,below=-3,scale=0.95] {$A'$};
\fill[myred!50!black] (R) circle (0.06) node[above right=-1] {$(x_0,v_0)$};
\fill[myred!50!black] (R') circle (0.06); %node[below right=-2] {$(x_1,0)$};
%\draw[->,mygreen!80!black] (\ang-15:1.1*\A) arc(\ang-15:\ang-40:0.9*\A);
%\draw[->,mygreen!80!black] (-18:1.2*\a) arc(-18:-60:\a);
\end{tikzpicture}
% PHASE DIAGRAM - different parameters
\begin{tikzpicture}
\message{^^JPHASE DIAGRAM: different parameters}
\def\xmax{2.0}
\def\A{1.5}
\def\ang{50}
\def\ry#1{\A*sin(\ang)*sqrt(1/(1-(cos(\ang)/#1)^2))}
%\def\rell#1{ {#1*\A} and {\A*sin(\ang)*sqrt(1/(1-(cos(\ang)/#1)^2))} }
\coordinate (O) at (0,0);
\coordinate (X) at (\A,0);
\coordinate (R) at (\ang:\A);
\draw[->,thick] (-1.12*\xmax,0) -- (1.12*\xmax+0.1,0) node[right=-1] {$x$\,[m]};
\draw[->,thick] (0,-\xmax) -- (0,\xmax+0.1) node[above=-1] {$v$\,[m/s]};
%\draw[xline] (0,0) circle(\A);
\draw[traj={0.055}{0.555},mypurple]
(0,0) ellipse({0.85*\A} and \ry{0.85});
\draw[traj={0.07}{0.57},mypurple]
(0,0) ellipse({0.5*0.85*\A} and 0.5*\ry{0.85});
\draw[traj={0.07}{0.57}]
(0,0) ellipse({1.25*\A} and \ry{1.25});
\draw[traj={0.07}{0.57}]
(0,0) ellipse({0.5*1.25*\A} and 0.5*\ry{1.25});
\fill[myred!50!black] (R) circle (0.06) node[above right=-1] {$(x_0,v_0)$};
%\draw[->,mygreen!80!black] (\ang-15:1.1*\A) arc(\ang-15:\ang-40:0.9*\A);
\node[above left,mypurple!80!black] at (110:\A) {large $\omega$};
\node[below right,xcol!80!black] at (-35:\A) {small $\omega$};
\end{tikzpicture}
% PHASE DIAGRAM - damped
\begin{tikzpicture}
\message{^^JPHASE DIAGRAM: damped}
\def\xmax{2.0}
\def\A{1.7}
\def\a{0.8}
\def\ang{60}
\def\T{0.5} % decay constant tau
\def\om{2.5} % decay constant tau
\coordinate (O) at (0,0);
\coordinate (X) at (\A,0);
\draw[->,thick] (-\xmax,0) -- (\xmax+0.1,0) node[right=-1] {$x$\,[m]};
\draw[->,thick] (0,-\xmax) -- (0,\xmax+0.1) node[above=-1] {$v$\,[m/s]};
\draw[->,xline,samples=100,variable=\t]
plot[domain=0:0.06]({\A*exp(-\t/\T)*cos(360*\om*\t)},{-\A*exp(-\t/\T)*sin(360*\om*\t)})
--++ (-150:0.08);
\draw[->,xline,samples=100,variable=\t]
plot[domain=0.05:0.34]({\A*exp(-\t/\T)*cos(360*\om*\t)},{-\A*exp(-\t/\T)*sin(360*\om*\t)})
--++ (-40:0.08);
\draw[xline,samples=200,variable=\t] %,line cap=round
plot[domain=0.3:2.1]({\A*exp(-\t/\T)*cos(360*\om*\t)},{-\A*exp(-\t/\T)*sin(360*\om*\t)});
\tick{0,-\A-0.01}{0} node[left=-2,scale=1] {$-\omega_0 A_0$};
\tick{0, \A+0.01}{0} node[left=-2,scale=1] {$\omega_0 A_0$};
\tick{-\A-0.01,0}{90} node[below=0,scale=1] {$-A_0$};
\tick{ \A+0.01,0}{-90} node[right=5,below=3,scale=1] {$A_0$};
\fill[myred!50!black] (X) circle (0.06) node[above=2] {$(x_0,0)$};
%\draw[->,mygreen!80!black] (-20:1.05*\A) arc(-20:-55:0.6*\A);
\end{tikzpicture}
%% PHASE DIAGRAM - pendulum
%% Sources:
%% https://tex.stackexchange.com/questions/545590/phase-portrait-of-van-der-pol-oscillator-with-pgfplots
%% http://matlab.cheme.cmu.edu/2011/08/09/phase-portraits-of-a-system-of-odes/
%% Instructions to compile this part of the code:
%% These curves were generated numerically with these MATLAB scripts:
%% https://github.com/IzaakWN/CodeSnippets/tree/master/LaTeX/TikZ/physics/dynamics_pendulum
%% To compile this part of the code, the curves need to be loaded via external txt files.
%% To download the txt files from GitHub via the command line, do e.g.
%% wget https://github.com/IzaakWN/CodeSnippets/raw/master/LaTeX/TikZ/physics/dynamics_phaseportrait.zip
%% unzip dynamics_phaseportrait.zip
%% or
%% svn checkout https://github.com/IzaakWN/CodeSnippets/trunk/LaTeX/TikZ/physics/dynamics_pendulum/data ./dynamics_pendulum/data
%\begin{tikzpicture}[scale=0.9]
% \message{^^JPHASE DIAGRAM: pendulum}
% \def\xmax{6.75}
% \def\ymax{3.15}
% \def\traj#1#2#3#4#5{ % pendulum trajectory curve
% \def\fname{dynamics_pendulum/data/pendulum_phase-#5.txt}
% \message{^^J Loading pendulum trajectory with initial omega = #5 from \fname...}
% \addplot[thin,xcol,postaction={decorate},decoration={markings,
% mark=at position #2 with {\arrow[thick,rotate=#4]{>}},
% mark=at position #3 with {\arrow[thick,rotate=#4]{>}}},#1]
% table {\fname};
% \addplot[xline,#1] table {\fname};
% }
% \def\pend#1#2{ % small pendulum diagram
% \def\R{0.55}
% \draw[mydarkblue,line width=0.9] ({(#1/180)*pi},-3.1) coordinate (O) --++ (#1-90:\R) coordinate(M);
% \draw[mydashed] (O) --++ (0,-0.9*\R) coordinate(B);
% \fill[mydarkblue!80!black] (O) circle(0.03);
% \draw[mydarkred,fill=myred] (M) circle(0.08);
% \ifnumcomp{#1}{>}{40}{
% \draw pic[-{>[flex'=1]},"$#2$"{scale=0.8},draw=black,angle radius=5,angle eccentricity=1.8] {angle = B--O--M};
% }{\ifnumcomp{#1}{<}{-40}{
% \draw pic[{<[flex'=1]}-,"$#2$"{scale=0.8},draw=black,angle radius=5,angle eccentricity=2.2] {angle = M--O--B};
% }{}}
% }
% \draw[->,thick] (-\xmax,0) -- (\xmax+0.1,0) node[right=-1] {$\theta$ [rad]};
% \draw[->,thick] (0,-\ymax) -- (0,\ymax+0.1) node[above=-2] {$\dot{\theta}$\,[rad/s]}; %\dfrac{\dd{\theta}}{\dd{t}}
% \begin{axis}[
% axis lines=none,anchor=origin,x=1cm,y=1cm,
% xmin=-2*pi,xmax=2*pi
% ]
%
% % CLOSED TRAJECTORIES
% \traj{}{0.150}{0.62}{9}{0p4}
% \traj{}{0.147}{0.61}{5}{0p8}
% \traj{}{0.145}{0.61}{2}{1p2}
% \traj{}{0.152}{0.64}{3}{1p6}
% \traj{myred}{0.130}{0.605}{0}{2p0}
% \begin{scope}[x filter/.code={\pgfmathparse{\pgfmathresult+2*pi}}]
% \traj{}{0.62}{0.81}{10}{0p4}
% \traj{}{0.61}{0.81}{5}{0p8}
% \traj{}{0.61}{0.82}{3}{1p2}
% \traj{}{0.64}{0.87}{0}{1p6}
% \traj{myred}{0.605}{0.858}{0}{2p0}
% \end{scope}
% \begin{scope}[x filter/.code={\pgfmathparse{\pgfmathresult-2*pi}}]
% \traj{}{0.150}{0.360}{10}{0p4}
% \traj{}{0.147}{0.360}{5}{0p8}
% \traj{}{0.145}{0.360}{3}{1p2}
% \traj{}{0.152}{0.382}{0}{1p6}
% \traj{myred}{0.130}{0.388}{0}{2p0}
% \end{scope}
% \draw[myred,very thick] (-pi-0.05,0) -- (-pi+0.05,0);
% \draw[myred,very thick] (pi-0.05,0) -- (pi+0.05,0);
%
% % OPEN TRAJECTORIES
% \traj{mypurple}{0.20}{0.80}{0}{2p4}
% \traj{mypurple}{0.20}{0.80}{0}{2p8}
% \begin{scope}[x filter/.code={\pgfmathparse{-\pgfmathresult}},
% y filter/.code={\pgfmathparse{-\pgfmathresult}}]
% \traj{mypurple}{0.20}{0.80}{0}{2p4}
% \traj{mypurple}{0.20}{0.80}{0}{2p8}
% \end{scope}
% %\draw[->,thick] (-3*pi,0) -- (3*pi,0);
%
% \end{axis}
% \tick{-pi,0}{90} node[left=0.5,below=-4,scale=0.9] {\strut$-\pi$};
% \tick{ pi,0}{90} node[below=-4,scale=0.9] {\strut$\pi$};
% \tick{-2*pi,0}{90} node[left=4,below=-4,scale=0.9] {\strut\contour{white}{$-2\pi$}};
% \tick{ 2*pi,0}{90} node[right=1,below=-4,scale=0.9] {\strut\contour{white}{$2\pi$}};
% \tick{ 0, 2}{ 0} node[above=4.8,left=-6,scale=0.9] {$2\omega_0$};
% \tick{ 0,-2}{ 0} node[below=4.8,left=-6,scale=0.9] {$-2\omega_0$};
% \node[mydarkblue,scale=0.8,rotate=-57] at (1.92,0.69) {closed};
% \node[mydarkred,scale=0.8,rotate=-45] at (2.60,0.83) {separatrix};
% \node[mypurple,scale=0.8] at (3.1,2.20) {open};
%
% \pend{ 335}{}
% \pend{ 270}{}
% \pend{ 180}{\pi}
% \pend{ 90}{} %\;\; \dfrac{\pi}{2}
% \pend{ 25}{}
% \pend{ -25}{}
% \pend{ -90}{}
% \pend{-180}{-\pi}
% \pend{-270}{} %-\dfrac{\pi}{2}\;\;\;
% \pend{-335}{}
%
%\end{tikzpicture}
\end{document}
Click to download: dynamics_phaseportrait.zip (including input txt files) • dynamics_phaseportrait.tex • dynamics_phaseportrait.pdf
Open in Overleaf: dynamics_phaseportrait.zip




The Latex code that you have provided isn’t working. Can you please share the rectified code.
Hi Lubaid,
As written in the post above, the curves in the last phase portrait (i.e. the pendulum) were made with data that were numerically generated with MATLAB and loaded as text files in TikZ using
\addplot table {....txt};. For technical reasons, they cannot be loaded in the Overleaf compiler on this web page. However, the.texcode should compile without problem on your local machine if you download the.txtfiles from this GitHub repo, or via this zip file, or on Overleaf. Please note that the TikZ code assumes the files are in a directorydynamics_pendulum/data/relative to the main.texfile, but you can change this.If you do not need the last phase portrait for a pendulum, just remove that part of the code.
I will try to make this more clear in the post above.
Cheers,
Izaak
Thank you very much.
Is there also a version for the pendulum with damping?
No, just the damped harmonic oscillator. If you want a plot of the exact solution for a damped pendulum, one would need to numerically generate the curves with MATLAB first, see https://github.com/IzaakWN/CodeSnippets/tree/master/LaTeX/TikZ/physics/dynamics_pendulum.